Solve the following Using MATLAB. (Please show the coding Script)

Homework Answers
%%% Matlab code
clc; close all; clear all; format long; G=tf([8],[1 -2 -1 2 4 -8 -4 0]); F=1; sys=feedback(G,F); pzmap(sys);
OUTPUT:
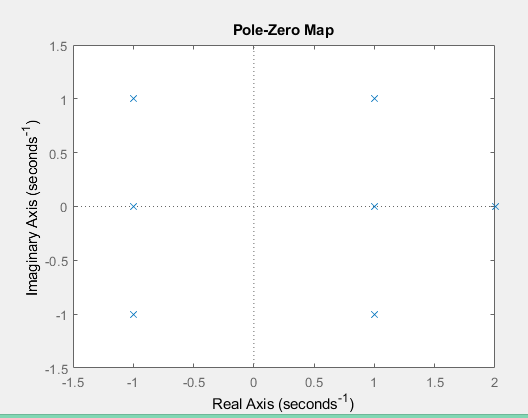
From pole zero diagram
No. of closed loop poles in right half plan = 4
No. of closed loop poles in left half plan = 3
No. of closed loop poles on jw axis= 0
Add Answer to:
Solve the following Using MATLAB. (Please show the coding
Script)
13. Solve Problem 13 Using MATLAB...
USING MATLAB TO SOLVE THIS PROBLEM - Figure Above ---------------------------------------------------------------------...
 USING MATLAB TO SOLVE THIS PROBLEM -
Figure Above
----------------------------------------------------------------------
We were unable to transcribe this image26. A numerically controlled machine tool positioning servomechanism has a normalized and scaled transfer function given by S(s+1 Performance specifications of the system in the unity feedback configu ration of Fig. 5.60 are satisfied if the closed-loop poles are located at (a) Show that this specification cannot be achieved by choosing propor tional control alone, D(s) = a lead compensator D)- that will s...
USING MATLAB TO SOLVE THIS PROBLEM -
Figure Above
----------------------------------------------------------------------
We were unable to transcribe this image26. A numerically controlled machine tool positioning servomechanism has a normalized and scaled transfer function given by S(s+1 Performance specifications of the system in the unity feedback configu ration of Fig. 5.60 are satisfied if the closed-loop poles are located at (a) Show that this specification cannot be achieved by choosing propor tional control alone, D(s) = a lead compensator D)- that will s...
Please solve it with step by step MATLAB code, thank you! Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and...
 Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz...
 Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz criterion, determine where the closed-loop poles are located (i.e., right half-plane, left half-plane, jo-axis)
Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz criterion, determine where the closed-loop poles are located (i.e., right half-plane, left half-plane, jo-axis)
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MAT...
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
Write a matlab script(using only matlab) for this. Write a script to solve the following problem:...
 Write a matlab script(using only matlab) for this.
Write a script to solve the following problem: Ask the user for the length and the width of a rectangle. These need to be passed to a function. The function is to calculate and return the area and the perimeter of the rectangle. The area is the length times the width and the perimeter is 2 times the length and 2 times the width. Make sure to suppress all output from the...
Write a matlab script(using only matlab) for this.
Write a script to solve the following problem: Ask the user for the length and the width of a rectangle. These need to be passed to a function. The function is to calculate and return the area and the perimeter of the rectangle. The area is the length times the width and the perimeter is 2 times the length and 2 times the width. Make sure to suppress all output from the...
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
Note: Please draw the Root Locus plots using Rules and verify your results with Matlab Commands....
 Note: Please draw the Root Locus plots using Rules and verify your results with Matlab Commands. Enclose both plots. For the unity feedback system, with the following transfer functions (as shown in problems 1 through 4), sketch the Root- Locus plot and find the following: (a) The break-away and break-in points (b) The jw-axis crossing (c) The angle of departures / arrivals at complex poles and zeros. (d) The range of the gain K, to keep the system stable. Problem...
Note: Please draw the Root Locus plots using Rules and verify your results with Matlab Commands. Enclose both plots. For the unity feedback system, with the following transfer functions (as shown in problems 1 through 4), sketch the Root- Locus plot and find the following: (a) The break-away and break-in points (b) The jw-axis crossing (c) The angle of departures / arrivals at complex poles and zeros. (d) The range of the gain K, to keep the system stable. Problem...
Please Solve As soon as Solve quickly I get you two UPVOTE directly Thank's Abdul-Rahim Taysir...
 Please Solve As soon as
Solve quickly I get you two UPVOTE directly
Thank's
Abdul-Rahim Taysir
Objective: is to test your understanding of the root locus sketch, and to see how MATLAB can help you Plot the root-locus for the following unity-feedback systems. You should apply the 10 Rules we dis- cussed in class; you should find breakaway/break-in points, angle of departures, asymptotes, jw-axis crossings, and range of K such that the system is stable. You should also verify your...
Please Solve As soon as
Solve quickly I get you two UPVOTE directly
Thank's
Abdul-Rahim Taysir
Objective: is to test your understanding of the root locus sketch, and to see how MATLAB can help you Plot the root-locus for the following unity-feedback systems. You should apply the 10 Rules we dis- cussed in class; you should find breakaway/break-in points, angle of departures, asymptotes, jw-axis crossings, and range of K such that the system is stable. You should also verify your...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
Please solve with detailed steps (NO MATLAB Solution).Thanks in advance 13. Consider the unity feedback system...
 Please solve with detailed steps (NO MATLAB
Solution).Thanks in advance
13. Consider the unity feedback system of Figure P9.1 with K G(s) s(s +20)(s +40) The system is operating at 20% overshoot. Design a compensator to decrease the settling time by a factor of 2 without affecting the percent overshoot and do the following: (Section: 9.3] a. Evaluate the uncompensated system's dominant poles, gain, and settling time. b. Evaluate the compensated system's dominant poles and settling time. c. Evaluate the...
Please solve with detailed steps (NO MATLAB
Solution).Thanks in advance
13. Consider the unity feedback system of Figure P9.1 with K G(s) s(s +20)(s +40) The system is operating at 20% overshoot. Design a compensator to decrease the settling time by a factor of 2 without affecting the percent overshoot and do the following: (Section: 9.3] a. Evaluate the uncompensated system's dominant poles, gain, and settling time. b. Evaluate the compensated system's dominant poles and settling time. c. Evaluate the...
 USING MATLAB TO SOLVE THIS PROBLEM -
Figure Above
----------------------------------------------------------------------
We were unable to transcribe this image26. A numerically controlled machine tool positioning servomechanism has a normalized and scaled transfer function given by S(s+1 Performance specifications of the system in the unity feedback configu ration of Fig. 5.60 are satisfied if the closed-loop poles are located at (a) Show that this specification cannot be achieved by choosing propor tional control alone, D(s) = a lead compensator D)- that will s...
USING MATLAB TO SOLVE THIS PROBLEM -
Figure Above
----------------------------------------------------------------------
We were unable to transcribe this image26. A numerically controlled machine tool positioning servomechanism has a normalized and scaled transfer function given by S(s+1 Performance specifications of the system in the unity feedback configu ration of Fig. 5.60 are satisfied if the closed-loop poles are located at (a) Show that this specification cannot be achieved by choosing propor tional control alone, D(s) = a lead compensator D)- that will s...
 Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
 Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz criterion, determine where the closed-loop poles are located (i.e., right half-plane, left half-plane, jo-axis)
Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz criterion, determine where the closed-loop poles are located (i.e., right half-plane, left half-plane, jo-axis)
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
 Write a matlab script(using only matlab) for this.
Write a script to solve the following problem: Ask the user for the length and the width of a rectangle. These need to be passed to a function. The function is to calculate and return the area and the perimeter of the rectangle. The area is the length times the width and the perimeter is 2 times the length and 2 times the width. Make sure to suppress all output from the...
Write a matlab script(using only matlab) for this.
Write a script to solve the following problem: Ask the user for the length and the width of a rectangle. These need to be passed to a function. The function is to calculate and return the area and the perimeter of the rectangle. The area is the length times the width and the perimeter is 2 times the length and 2 times the width. Make sure to suppress all output from the...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 Note: Please draw the Root Locus plots using Rules and verify your results with Matlab Commands. Enclose both plots. For the unity feedback system, with the following transfer functions (as shown in problems 1 through 4), sketch the Root- Locus plot and find the following: (a) The break-away and break-in points (b) The jw-axis crossing (c) The angle of departures / arrivals at complex poles and zeros. (d) The range of the gain K, to keep the system stable. Problem...
Note: Please draw the Root Locus plots using Rules and verify your results with Matlab Commands. Enclose both plots. For the unity feedback system, with the following transfer functions (as shown in problems 1 through 4), sketch the Root- Locus plot and find the following: (a) The break-away and break-in points (b) The jw-axis crossing (c) The angle of departures / arrivals at complex poles and zeros. (d) The range of the gain K, to keep the system stable. Problem...
 Please Solve As soon as
Solve quickly I get you two UPVOTE directly
Thank's
Abdul-Rahim Taysir
Objective: is to test your understanding of the root locus sketch, and to see how MATLAB can help you Plot the root-locus for the following unity-feedback systems. You should apply the 10 Rules we dis- cussed in class; you should find breakaway/break-in points, angle of departures, asymptotes, jw-axis crossings, and range of K such that the system is stable. You should also verify your...
Please Solve As soon as
Solve quickly I get you two UPVOTE directly
Thank's
Abdul-Rahim Taysir
Objective: is to test your understanding of the root locus sketch, and to see how MATLAB can help you Plot the root-locus for the following unity-feedback systems. You should apply the 10 Rules we dis- cussed in class; you should find breakaway/break-in points, angle of departures, asymptotes, jw-axis crossings, and range of K such that the system is stable. You should also verify your...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
 Please solve with detailed steps (NO MATLAB
Solution).Thanks in advance
13. Consider the unity feedback system of Figure P9.1 with K G(s) s(s +20)(s +40) The system is operating at 20% overshoot. Design a compensator to decrease the settling time by a factor of 2 without affecting the percent overshoot and do the following: (Section: 9.3] a. Evaluate the uncompensated system's dominant poles, gain, and settling time. b. Evaluate the compensated system's dominant poles and settling time. c. Evaluate the...
Please solve with detailed steps (NO MATLAB
Solution).Thanks in advance
13. Consider the unity feedback system of Figure P9.1 with K G(s) s(s +20)(s +40) The system is operating at 20% overshoot. Design a compensator to decrease the settling time by a factor of 2 without affecting the percent overshoot and do the following: (Section: 9.3] a. Evaluate the uncompensated system's dominant poles, gain, and settling time. b. Evaluate the compensated system's dominant poles and settling time. c. Evaluate the...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago