
axis; d is the offset along where 0 is the angle about previous z axis, from old x axis to new x previous z axis to the common normal; a is the length of the common normal; a is the angle about common normal, from old z axis to new z axis. 3. The transformation A, (i- 1, 2,..) between two successive frames represents the preceding four movements, i.e. the product of four matrices. The resultant matrix is shown as follows. [C-SCa Sa a,C -CSa a S Cat d A,SGCa Sa 0 1 0 0 0 where C is cos0, S is sine, Cais cosa, and Sa, is sina, respectively. Write down all the A, (i 1, 2, ..) matrices and finally derive the whole matrix T from the universal frame Fo to the end effector frame FH by multiplying all A, (i 1, 2,..) matrices together. (You can handle Fu to Fo like you did in your project and ignore di+d2.)
Homework Answers

Homogenous Matrix (T)=Rotation About X-axis(\alpha)* Translation along X-axis(a)* translation along Z-axis(d)* Rotation about Z-axis(\theta)
T=T1*T2*T3*T4*T5

DH2HomTrans[\[Theta]_, d_, a_, \[Alpha]_] :=
Module[{Rz, Td, Ta, Rx, Ti},
Rz = {{Cos[\[Theta]], -Sin[\[Theta]], 0, 0}, {Sin[\[Theta]],
Cos[\[Theta]], 0, 0}, {0, 0, 1, 0}, {0, 0, 0, 1}};
Td = {{1, 0, 0, 0}, {0, 1, 0, 0}, {0, 0, 1, d}, {0, 0, 0,
1}};
Ta = {{1, 0, 0, a}, {0, 1, 0, 0}, {0, 0, 1, 0}, {0, 0, 0,
1}};
Rx = {{1, 0, 0, 0}, {0, Cos[\[Alpha]], -Sin[\[Alpha]], 0},
{0,
Sin[\[Alpha]], Cos[\[Alpha]], 0}, {0, 0, 0, 1}};
Ti = Rx.(Ta.(Td.Rz));
Return[Ti];
]
T1 = DH2HomTrans[\[Theta]1, 0, 0, 0]
MatrixForm[T1]
T2 = DH2HomTrans[0, d1, 0, 0];
MatrixForm[T2]
T3 = DH2HomTrans[\[Theta]2, d2, d3, 0];
MatrixForm[T3]
T4 = DH2HomTrans[0, 0, d4, 0];
MatrixForm[T4]
T5 = DH2HomTrans[\[Theta]4, d5, 0, 0];
MatrixForm[T5]
T = T1.T2.T3.T4.T5;
Simplify[MatrixForm[T]]
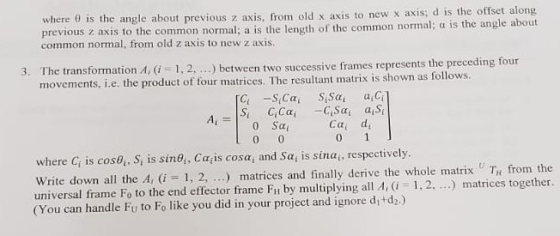
Final Answer
![Cos [e1e2 04] - Sin[el Cos [e1 + e2 +04] e2 + 04] 0 d3 Cos [el) +d4 Cos [el + e2] 0 d3 Sin[e1 +d4 Sin[el e2] Sin[e1 e2+ 04] d](http://img.homeworklib.com/images/0baaa512-f250-4213-bd93-448e88b5634d.png?x-oss-process=image/resize,w_560)
You can use Matlab too
Add Answer to:
Figure 1 shows a SCARA (Selective Compliance Assembly Robot Arm)- type robot. 1. According to preliminary...
Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H...
 Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H convention is used b) Using the D-H frames, express rotation matrix R as a function of 8,8... c) Solve the inverse kinematics problem, that is, 0.0... given a desired orientation defined by the rotation matrix: - Jq4. where d) Express the Jacobian matrix for the relationship velocity of frame 3 expressed within frame o. is the absolute angular Figure 3: 3-Dof robot with the...
Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H convention is used b) Using the D-H frames, express rotation matrix R as a function of 8,8... c) Solve the inverse kinematics problem, that is, 0.0... given a desired orientation defined by the rotation matrix: - Jq4. where d) Express the Jacobian matrix for the relationship velocity of frame 3 expressed within frame o. is the absolute angular Figure 3: 3-Dof robot with the...
This Question is from Robot Kinematics. Hope someone can help me solve this out. Figure B1...
 This Question is from Robot Kinematics. Hope someone can help me
solve this out.
Figure B1 shows a 4-DOF robot at its home position. The robot has 3 revolute joints (01, 02, 04) and 1 prismatic joint (13). The coordinate frames and their origin are assigned as shown in the figure. J3 02 04 01 1 IT 30 Y2 M 1 Fo X4 Xo V Y4 Figure B1 B1 Determine the D-H links parameters for this robot. [8 marks] B2...
This Question is from Robot Kinematics. Hope someone can help me
solve this out.
Figure B1 shows a 4-DOF robot at its home position. The robot has 3 revolute joints (01, 02, 04) and 1 prismatic joint (13). The coordinate frames and their origin are assigned as shown in the figure. J3 02 04 01 1 IT 30 Y2 M 1 Fo X4 Xo V Y4 Figure B1 B1 Determine the D-H links parameters for this robot. [8 marks] B2...
Please Help! Electrical Engineering Algorithm & Control 2. A rotation around an axis w for angle...
 Please Help! Electrical Engineering Algorithm &
Control
2. A rotation around an axis w for angle θ, denoted by Roto(0), leaves the axis unchanged. That is, Rota,(9) . w = a. Using this fact, write the coordinate rotation matrices Rot, (0), Roty (0) and Rot (0) that represent the rotation for an angle θ around x, y and z axes, respectively. Hint: For a linear map, the matrix describing the map has the columns equal to the maps of the...
Please Help! Electrical Engineering Algorithm &
Control
2. A rotation around an axis w for angle θ, denoted by Roto(0), leaves the axis unchanged. That is, Rota,(9) . w = a. Using this fact, write the coordinate rotation matrices Rot, (0), Roty (0) and Rot (0) that represent the rotation for an angle θ around x, y and z axes, respectively. Hint: For a linear map, the matrix describing the map has the columns equal to the maps of the...
1. Write R' = {(x, y) |X, Y ER} to represent the set of all 1x2...
 1. Write R' = {(x, y) |X, Y ER} to represent the set of all 1x2 row vectors of real numbers. This is the standard Euclidean plane you all know and love. If such a row vector is multiplied on the right by a 2x2 matrix, then the output is again in R"; such matrices are called linear transformations. 1. Find a linear transformation that rotates the plane R by a radians. That is, find a matrix T such that...
1. Write R' = {(x, y) |X, Y ER} to represent the set of all 1x2 row vectors of real numbers. This is the standard Euclidean plane you all know and love. If such a row vector is multiplied on the right by a 2x2 matrix, then the output is again in R"; such matrices are called linear transformations. 1. Find a linear transformation that rotates the plane R by a radians. That is, find a matrix T such that...
1. Consider the SCARA manipulator shown in the figure. (a) Perform the forward displacement analysis for...
 1. Consider the SCARA manipulator shown in the figure. (a) Perform the forward displacement analysis for the manipulator relating the the twist T= Se in terms of the joint angles Oj, i=1,2,4 and dz. The variable (e is measured in reference to the fixed X axis. If de = 0, then the gripper is aligned with the fixed X axis. Use Homogenous Transformation Matrices. (b) Find the Jacobian J of the manipulator relating the twist T = in terms of...
1. Consider the SCARA manipulator shown in the figure. (a) Perform the forward displacement analysis for the manipulator relating the the twist T= Se in terms of the joint angles Oj, i=1,2,4 and dz. The variable (e is measured in reference to the fixed X axis. If de = 0, then the gripper is aligned with the fixed X axis. Use Homogenous Transformation Matrices. (b) Find the Jacobian J of the manipulator relating the twist T = in terms of...
1 -1 -b 1 The inverse of matrix A is (see explanation in Sec. 5.6) and...
 1 -1 -b 1 The inverse of matrix A is (see explanation in Sec. 5.6) and d lo+Go A-1 1 1-blb 1 Thus the solution of the model isx A d, or CISE 4.6 1.Given A-B1--B -t].and c-l 1 0 9 ].find A, e-arnd C -1 3 , find A, 8', and C 2. Use the matrices given in Prob. 1 to verify that 3. Generalize the result (4.11) to the case of a product of three matrices by proving...
1 -1 -b 1 The inverse of matrix A is (see explanation in Sec. 5.6) and d lo+Go A-1 1 1-blb 1 Thus the solution of the model isx A d, or CISE 4.6 1.Given A-B1--B -t].and c-l 1 0 9 ].find A, e-arnd C -1 3 , find A, 8', and C 2. Use the matrices given in Prob. 1 to verify that 3. Generalize the result (4.11) to the case of a product of three matrices by proving...
Problem 1. (15 points) Recall, the Eulerian angles that we defined in class as shown below....
 Problem 1. (15 points) Recall, the Eulerian angles that we defined in class as shown below. The axes (î, þ, â) are fixed in body frame B and the axes (Î, Ê, Â) are fixed in the inertial reference frame F. The orientation of B with respect to mathF is represented through the angles (0, 0, 4) using a sequence about intermediate z, intermediate y and intermediate z-axis again to obtain body-fixed frame B in the final configuration, from the...
Problem 1. (15 points) Recall, the Eulerian angles that we defined in class as shown below. The axes (î, þ, â) are fixed in body frame B and the axes (Î, Ê, Â) are fixed in the inertial reference frame F. The orientation of B with respect to mathF is represented through the angles (0, 0, 4) using a sequence about intermediate z, intermediate y and intermediate z-axis again to obtain body-fixed frame B in the final configuration, from the...
MATLAB EXERCISE 5 This exercise focuses on the Jacobian matrix and determinant, simulated resolved-rate control, and...
 MATLAB EXERCISE 5 This exercise focuses on the Jacobian matrix and determinant, simulated resolved-rate control, and inverse statics for the planar 3-DOF, 3R robot. (See Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8.) The resolved-rate control method [9] is based on the manipulator velocity equation x = kve, where ky is the Jacobian matrix, is the vector of relative joint rates, X is the vector of commanded Cartesian velocities (both translational and rotational), and k is...
MATLAB EXERCISE 5 This exercise focuses on the Jacobian matrix and determinant, simulated resolved-rate control, and inverse statics for the planar 3-DOF, 3R robot. (See Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8.) The resolved-rate control method [9] is based on the manipulator velocity equation x = kve, where ky is the Jacobian matrix, is the vector of relative joint rates, X is the vector of commanded Cartesian velocities (both translational and rotational), and k is...
4. For this question, we define the following matrices: 1-2 0 To 61 C= 0 -1...
 4. For this question, we define the following matrices: 1-2 0 To 61 C= 0 -1 2 , D= 3 1 . [3 24 L-2 -1] (a) For each of the following, state whether or not the expression can be evaluated. If it can be, evaluate it. If it cannot be, explain why. i. B? +D ii. AD iii. C + DB iv. CT-C (b) Find three distinct vectors X1, X2, X3 such that Bx; = 0 for i =...
4. For this question, we define the following matrices: 1-2 0 To 61 C= 0 -1 2 , D= 3 1 . [3 24 L-2 -1] (a) For each of the following, state whether or not the expression can be evaluated. If it can be, evaluate it. If it cannot be, explain why. i. B? +D ii. AD iii. C + DB iv. CT-C (b) Find three distinct vectors X1, X2, X3 such that Bx; = 0 for i =...
True or False 1. If u, v are vectors in R"and lu + v1l = |||||...
 True or False 1. If u, v are vectors in R"and lu + v1l = ||||| + ||v||, then u and v are orthogonal. 2. If p locates a point on a line l in Rand if n # 0 is normal to l, then any other point x on I must satisfy n.x=n.p. 3. A binary vector is a vector with two components which are integers modulo 2. 4. The set of solution vectors to the linear system Ax=b...
True or False 1. If u, v are vectors in R"and lu + v1l = ||||| + ||v||, then u and v are orthogonal. 2. If p locates a point on a line l in Rand if n # 0 is normal to l, then any other point x on I must satisfy n.x=n.p. 3. A binary vector is a vector with two components which are integers modulo 2. 4. The set of solution vectors to the linear system Ax=b...
 Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H convention is used b) Using the D-H frames, express rotation matrix R as a function of 8,8... c) Solve the inverse kinematics problem, that is, 0.0... given a desired orientation defined by the rotation matrix: - Jq4. where d) Express the Jacobian matrix for the relationship velocity of frame 3 expressed within frame o. is the absolute angular Figure 3: 3-Dof robot with the...
Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H convention is used b) Using the D-H frames, express rotation matrix R as a function of 8,8... c) Solve the inverse kinematics problem, that is, 0.0... given a desired orientation defined by the rotation matrix: - Jq4. where d) Express the Jacobian matrix for the relationship velocity of frame 3 expressed within frame o. is the absolute angular Figure 3: 3-Dof robot with the...
 This Question is from Robot Kinematics. Hope someone can help me
solve this out.
Figure B1 shows a 4-DOF robot at its home position. The robot has 3 revolute joints (01, 02, 04) and 1 prismatic joint (13). The coordinate frames and their origin are assigned as shown in the figure. J3 02 04 01 1 IT 30 Y2 M 1 Fo X4 Xo V Y4 Figure B1 B1 Determine the D-H links parameters for this robot. [8 marks] B2...
This Question is from Robot Kinematics. Hope someone can help me
solve this out.
Figure B1 shows a 4-DOF robot at its home position. The robot has 3 revolute joints (01, 02, 04) and 1 prismatic joint (13). The coordinate frames and their origin are assigned as shown in the figure. J3 02 04 01 1 IT 30 Y2 M 1 Fo X4 Xo V Y4 Figure B1 B1 Determine the D-H links parameters for this robot. [8 marks] B2...
 Please Help! Electrical Engineering Algorithm &
Control
2. A rotation around an axis w for angle θ, denoted by Roto(0), leaves the axis unchanged. That is, Rota,(9) . w = a. Using this fact, write the coordinate rotation matrices Rot, (0), Roty (0) and Rot (0) that represent the rotation for an angle θ around x, y and z axes, respectively. Hint: For a linear map, the matrix describing the map has the columns equal to the maps of the...
Please Help! Electrical Engineering Algorithm &
Control
2. A rotation around an axis w for angle θ, denoted by Roto(0), leaves the axis unchanged. That is, Rota,(9) . w = a. Using this fact, write the coordinate rotation matrices Rot, (0), Roty (0) and Rot (0) that represent the rotation for an angle θ around x, y and z axes, respectively. Hint: For a linear map, the matrix describing the map has the columns equal to the maps of the...
 1. Write R' = {(x, y) |X, Y ER} to represent the set of all 1x2 row vectors of real numbers. This is the standard Euclidean plane you all know and love. If such a row vector is multiplied on the right by a 2x2 matrix, then the output is again in R"; such matrices are called linear transformations. 1. Find a linear transformation that rotates the plane R by a radians. That is, find a matrix T such that...
1. Write R' = {(x, y) |X, Y ER} to represent the set of all 1x2 row vectors of real numbers. This is the standard Euclidean plane you all know and love. If such a row vector is multiplied on the right by a 2x2 matrix, then the output is again in R"; such matrices are called linear transformations. 1. Find a linear transformation that rotates the plane R by a radians. That is, find a matrix T such that...
 1. Consider the SCARA manipulator shown in the figure. (a) Perform the forward displacement analysis for the manipulator relating the the twist T= Se in terms of the joint angles Oj, i=1,2,4 and dz. The variable (e is measured in reference to the fixed X axis. If de = 0, then the gripper is aligned with the fixed X axis. Use Homogenous Transformation Matrices. (b) Find the Jacobian J of the manipulator relating the twist T = in terms of...
1. Consider the SCARA manipulator shown in the figure. (a) Perform the forward displacement analysis for the manipulator relating the the twist T= Se in terms of the joint angles Oj, i=1,2,4 and dz. The variable (e is measured in reference to the fixed X axis. If de = 0, then the gripper is aligned with the fixed X axis. Use Homogenous Transformation Matrices. (b) Find the Jacobian J of the manipulator relating the twist T = in terms of...
 1 -1 -b 1 The inverse of matrix A is (see explanation in Sec. 5.6) and d lo+Go A-1 1 1-blb 1 Thus the solution of the model isx A d, or CISE 4.6 1.Given A-B1--B -t].and c-l 1 0 9 ].find A, e-arnd C -1 3 , find A, 8', and C 2. Use the matrices given in Prob. 1 to verify that 3. Generalize the result (4.11) to the case of a product of three matrices by proving...
1 -1 -b 1 The inverse of matrix A is (see explanation in Sec. 5.6) and d lo+Go A-1 1 1-blb 1 Thus the solution of the model isx A d, or CISE 4.6 1.Given A-B1--B -t].and c-l 1 0 9 ].find A, e-arnd C -1 3 , find A, 8', and C 2. Use the matrices given in Prob. 1 to verify that 3. Generalize the result (4.11) to the case of a product of three matrices by proving...
 Problem 1. (15 points) Recall, the Eulerian angles that we defined in class as shown below. The axes (î, þ, â) are fixed in body frame B and the axes (Î, Ê, Â) are fixed in the inertial reference frame F. The orientation of B with respect to mathF is represented through the angles (0, 0, 4) using a sequence about intermediate z, intermediate y and intermediate z-axis again to obtain body-fixed frame B in the final configuration, from the...
Problem 1. (15 points) Recall, the Eulerian angles that we defined in class as shown below. The axes (î, þ, â) are fixed in body frame B and the axes (Î, Ê, Â) are fixed in the inertial reference frame F. The orientation of B with respect to mathF is represented through the angles (0, 0, 4) using a sequence about intermediate z, intermediate y and intermediate z-axis again to obtain body-fixed frame B in the final configuration, from the...
 MATLAB EXERCISE 5 This exercise focuses on the Jacobian matrix and determinant, simulated resolved-rate control, and inverse statics for the planar 3-DOF, 3R robot. (See Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8.) The resolved-rate control method [9] is based on the manipulator velocity equation x = kve, where ky is the Jacobian matrix, is the vector of relative joint rates, X is the vector of commanded Cartesian velocities (both translational and rotational), and k is...
MATLAB EXERCISE 5 This exercise focuses on the Jacobian matrix and determinant, simulated resolved-rate control, and inverse statics for the planar 3-DOF, 3R robot. (See Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8.) The resolved-rate control method [9] is based on the manipulator velocity equation x = kve, where ky is the Jacobian matrix, is the vector of relative joint rates, X is the vector of commanded Cartesian velocities (both translational and rotational), and k is...
 4. For this question, we define the following matrices: 1-2 0 To 61 C= 0 -1 2 , D= 3 1 . [3 24 L-2 -1] (a) For each of the following, state whether or not the expression can be evaluated. If it can be, evaluate it. If it cannot be, explain why. i. B? +D ii. AD iii. C + DB iv. CT-C (b) Find three distinct vectors X1, X2, X3 such that Bx; = 0 for i =...
4. For this question, we define the following matrices: 1-2 0 To 61 C= 0 -1 2 , D= 3 1 . [3 24 L-2 -1] (a) For each of the following, state whether or not the expression can be evaluated. If it can be, evaluate it. If it cannot be, explain why. i. B? +D ii. AD iii. C + DB iv. CT-C (b) Find three distinct vectors X1, X2, X3 such that Bx; = 0 for i =...
 True or False 1. If u, v are vectors in R"and lu + v1l = ||||| + ||v||, then u and v are orthogonal. 2. If p locates a point on a line l in Rand if n # 0 is normal to l, then any other point x on I must satisfy n.x=n.p. 3. A binary vector is a vector with two components which are integers modulo 2. 4. The set of solution vectors to the linear system Ax=b...
True or False 1. If u, v are vectors in R"and lu + v1l = ||||| + ||v||, then u and v are orthogonal. 2. If p locates a point on a line l in Rand if n # 0 is normal to l, then any other point x on I must satisfy n.x=n.p. 3. A binary vector is a vector with two components which are integers modulo 2. 4. The set of solution vectors to the linear system Ax=b...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago