
Homework Answers

Add Answer to:
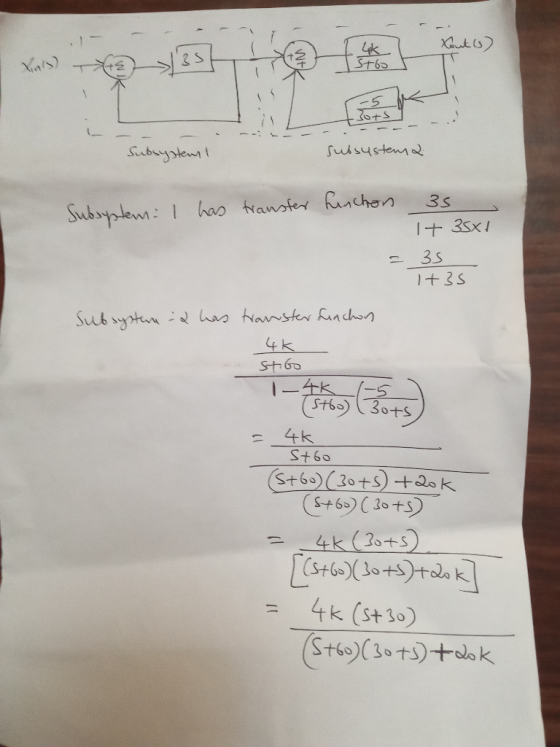
- = ? 2. (23 pts) a) A feedback system is shown in the figure. What...
1) (10 pts) Consider the unity feedback system shown in the figure: For each of the...
 1) (10 pts) Consider the unity feedback system shown in the figure: For each of the following transfer function G(s), plot its Bode plots using Matlab command "bode", and then work on the plots to find out the crossover frequency phase margin . the phase crossover frequency and the gain margin GM: (a) G(s)= , the S+4 s(s + l)(s + 2)(s +10) (b) Gs)100
1) (10 pts) Consider the unity feedback system shown in the figure: For each of the following transfer function G(s), plot its Bode plots using Matlab command "bode", and then work on the plots to find out the crossover frequency phase margin . the phase crossover frequency and the gain margin GM: (a) G(s)= , the S+4 s(s + l)(s + 2)(s +10) (b) Gs)100
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s)...
 C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
Consider the electro-mechanical feedback control system shown in Figure 3. The voltage Ea(s) - Liea(t)) is...
 Consider the electro-mechanical feedback control system shown in Figure 3. The voltage Ea(s) - Liea(t)) is generated by an amplifier whose transfer function is Ga(s) -5 The position sensor has a transfer function H(s) 1 and the pre-compensator transfer function is pot X (s) Ea(s) The "Electro-Mechanical System" block, is X(s) Ea(s) 5.05s3 101s2 +505.2s 100 R(s) Amplifier, |Ea(S)Electro-MechanicalX(S) Controller, Gc(s) K, pot Ga(s) System, G(s) Encoder H(s) Figure 3: Electro-mechanical control system for Question 3 Consider a proportional controller...
Consider the electro-mechanical feedback control system shown in Figure 3. The voltage Ea(s) - Liea(t)) is generated by an amplifier whose transfer function is Ga(s) -5 The position sensor has a transfer function H(s) 1 and the pre-compensator transfer function is pot X (s) Ea(s) The "Electro-Mechanical System" block, is X(s) Ea(s) 5.05s3 101s2 +505.2s 100 R(s) Amplifier, |Ea(S)Electro-MechanicalX(S) Controller, Gc(s) K, pot Ga(s) System, G(s) Encoder H(s) Figure 3: Electro-mechanical control system for Question 3 Consider a proportional controller...
Give me the explanation plz 2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) =...
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
2. Aunity feedback system is shown in the Figure (a) below has open-loop poles at land...
 2. Aunity feedback system is shown in the Figure (a) below has open-loop poles at land apero at The root locus plot for the open-loop transfer function for K> is as shown in Figure (b) below. Determine the open-loop transfer function (in) closed-loop transfer function(i) characteristic equation and the liv the break-in point. (4+4 +2.5) (vill the pain K is chosen as 5 will the closed-loop system have an oscillatory response to a step input? Justify your answer mathematically(5) 11
2. Aunity feedback system is shown in the Figure (a) below has open-loop poles at land apero at The root locus plot for the open-loop transfer function for K> is as shown in Figure (b) below. Determine the open-loop transfer function (in) closed-loop transfer function(i) characteristic equation and the liv the break-in point. (4+4 +2.5) (vill the pain K is chosen as 5 will the closed-loop system have an oscillatory response to a step input? Justify your answer mathematically(5) 11
b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b)....
 b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b). Nyqulst Diagram x 10 1.5 1- System: N Real: -9.08e-005 0.5- Imag: -5.62e-006 Frequency (rad/sec): -104 -0.5 -15 -1.5 0.5 0.5 1.5 1 2.5 3.5 Real Axis x 10 Figure Q5(b) K If the transfer function of the system is given as G(s) (s+10)(s+50)(s+150) determine the following: The closed loop stability of the system using Nyquist Stability Criterion. i) ii) Gain margin and phase...
b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b). Nyqulst Diagram x 10 1.5 1- System: N Real: -9.08e-005 0.5- Imag: -5.62e-006 Frequency (rad/sec): -104 -0.5 -15 -1.5 0.5 0.5 1.5 1 2.5 3.5 Real Axis x 10 Figure Q5(b) K If the transfer function of the system is given as G(s) (s+10)(s+50)(s+150) determine the following: The closed loop stability of the system using Nyquist Stability Criterion. i) ii) Gain margin and phase...
(10 pts) 2. Determine the range of K for stability of a unity feedback control system...
 (10 pts) 2. Determine the range of K for stability of a unity feedback control system whose open-loop transfer function is: K(2s +1) G(s)= s(s-1)(s+2)
(10 pts) 2. Determine the range of K for stability of a unity feedback control system whose open-loop transfer function is: K(2s +1) G(s)= s(s-1)(s+2)
Consider the feedback system shown below: +e[n] xlnDelay → y[n] (a) Write an expression for y[n]...
 Consider the feedback system shown below: +e[n] xlnDelay → y[n] (a) Write an expression for y[n] in terms of xIn- 1] and y[n -1]. (b) Determine the transfer function of the system. (c) Determine the impulse response of the system (d) Determine if the system is BIBO stable.
Consider the feedback system shown below: +e[n] xlnDelay → y[n] (a) Write an expression for y[n] in terms of xIn- 1] and y[n -1]. (b) Determine the transfer function of the system. (c) Determine the impulse response of the system (d) Determine if the system is BIBO stable.
Problem 2. (20 pts) For the unity feedback system shown in the figure, specify the gain...
 Problem 2. (20 pts) For the unity feedback system shown in the figure, specify the gain K of the proportional controller so that the output y(t) has an overshoot of no more than 10% in response to a unit step. R9010 KG R(S) OF FOY(s) S(s + 2)
Problem 2. (20 pts) For the unity feedback system shown in the figure, specify the gain K of the proportional controller so that the output y(t) has an overshoot of no more than 10% in response to a unit step. R9010 KG R(S) OF FOY(s) S(s + 2)
 1) (10 pts) Consider the unity feedback system shown in the figure: For each of the following transfer function G(s), plot its Bode plots using Matlab command "bode", and then work on the plots to find out the crossover frequency phase margin . the phase crossover frequency and the gain margin GM: (a) G(s)= , the S+4 s(s + l)(s + 2)(s +10) (b) Gs)100
1) (10 pts) Consider the unity feedback system shown in the figure: For each of the following transfer function G(s), plot its Bode plots using Matlab command "bode", and then work on the plots to find out the crossover frequency phase margin . the phase crossover frequency and the gain margin GM: (a) G(s)= , the S+4 s(s + l)(s + 2)(s +10) (b) Gs)100
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
 C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
 Consider the electro-mechanical feedback control system shown in Figure 3. The voltage Ea(s) - Liea(t)) is generated by an amplifier whose transfer function is Ga(s) -5 The position sensor has a transfer function H(s) 1 and the pre-compensator transfer function is pot X (s) Ea(s) The "Electro-Mechanical System" block, is X(s) Ea(s) 5.05s3 101s2 +505.2s 100 R(s) Amplifier, |Ea(S)Electro-MechanicalX(S) Controller, Gc(s) K, pot Ga(s) System, G(s) Encoder H(s) Figure 3: Electro-mechanical control system for Question 3 Consider a proportional controller...
Consider the electro-mechanical feedback control system shown in Figure 3. The voltage Ea(s) - Liea(t)) is generated by an amplifier whose transfer function is Ga(s) -5 The position sensor has a transfer function H(s) 1 and the pre-compensator transfer function is pot X (s) Ea(s) The "Electro-Mechanical System" block, is X(s) Ea(s) 5.05s3 101s2 +505.2s 100 R(s) Amplifier, |Ea(S)Electro-MechanicalX(S) Controller, Gc(s) K, pot Ga(s) System, G(s) Encoder H(s) Figure 3: Electro-mechanical control system for Question 3 Consider a proportional controller...
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
 2. Aunity feedback system is shown in the Figure (a) below has open-loop poles at land apero at The root locus plot for the open-loop transfer function for K> is as shown in Figure (b) below. Determine the open-loop transfer function (in) closed-loop transfer function(i) characteristic equation and the liv the break-in point. (4+4 +2.5) (vill the pain K is chosen as 5 will the closed-loop system have an oscillatory response to a step input? Justify your answer mathematically(5) 11
2. Aunity feedback system is shown in the Figure (a) below has open-loop poles at land apero at The root locus plot for the open-loop transfer function for K> is as shown in Figure (b) below. Determine the open-loop transfer function (in) closed-loop transfer function(i) characteristic equation and the liv the break-in point. (4+4 +2.5) (vill the pain K is chosen as 5 will the closed-loop system have an oscillatory response to a step input? Justify your answer mathematically(5) 11
 b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b). Nyqulst Diagram x 10 1.5 1- System: N Real: -9.08e-005 0.5- Imag: -5.62e-006 Frequency (rad/sec): -104 -0.5 -15 -1.5 0.5 0.5 1.5 1 2.5 3.5 Real Axis x 10 Figure Q5(b) K If the transfer function of the system is given as G(s) (s+10)(s+50)(s+150) determine the following: The closed loop stability of the system using Nyquist Stability Criterion. i) ii) Gain margin and phase...
b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b). Nyqulst Diagram x 10 1.5 1- System: N Real: -9.08e-005 0.5- Imag: -5.62e-006 Frequency (rad/sec): -104 -0.5 -15 -1.5 0.5 0.5 1.5 1 2.5 3.5 Real Axis x 10 Figure Q5(b) K If the transfer function of the system is given as G(s) (s+10)(s+50)(s+150) determine the following: The closed loop stability of the system using Nyquist Stability Criterion. i) ii) Gain margin and phase...
 (10 pts) 2. Determine the range of K for stability of a unity feedback control system whose open-loop transfer function is: K(2s +1) G(s)= s(s-1)(s+2)
(10 pts) 2. Determine the range of K for stability of a unity feedback control system whose open-loop transfer function is: K(2s +1) G(s)= s(s-1)(s+2)
 Consider the feedback system shown below: +e[n] xlnDelay → y[n] (a) Write an expression for y[n] in terms of xIn- 1] and y[n -1]. (b) Determine the transfer function of the system. (c) Determine the impulse response of the system (d) Determine if the system is BIBO stable.
Consider the feedback system shown below: +e[n] xlnDelay → y[n] (a) Write an expression for y[n] in terms of xIn- 1] and y[n -1]. (b) Determine the transfer function of the system. (c) Determine the impulse response of the system (d) Determine if the system is BIBO stable.
 Problem 2. (20 pts) For the unity feedback system shown in the figure, specify the gain K of the proportional controller so that the output y(t) has an overshoot of no more than 10% in response to a unit step. R9010 KG R(S) OF FOY(s) S(s + 2)
Problem 2. (20 pts) For the unity feedback system shown in the figure, specify the gain K of the proportional controller so that the output y(t) has an overshoot of no more than 10% in response to a unit step. R9010 KG R(S) OF FOY(s) S(s + 2)
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago