


Homework Answers






Add Answer to:
Show the movement of the masses with time by creating a MATLAB
GUIDE file that takes...
Use MATLAB Simulink Use a similar way to this: (the picture from the left is cut...
 Use MATLAB Simulink
Use a similar way to this: (the picture from the left is cut a
little)
Use MATLAB Simulink to build the block diagram for the system M m x2 +kı (x2-u) + Kz (x2-x1) + k3 (x2-x) = 0 m_x3 + k} (x3 – x2) = 0 kz (x2 – x1) = c(*. - ů) YA 1417 ДА | AA
Use MATLAB Simulink
Use a similar way to this: (the picture from the left is cut a
little)
Use MATLAB Simulink to build the block diagram for the system M m x2 +kı (x2-u) + Kz (x2-x1) + k3 (x2-x) = 0 m_x3 + k} (x3 – x2) = 0 kz (x2 – x1) = c(*. - ů) YA 1417 ДА | AA
4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and...
 4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and x2 for the first 50 seconds when the applied force fal increases from 0 to 10 N at t = 1 s. The parameter values are M1 = M2 = 10 kg, B = 20 Ns/m, and Ki = K2 = 10 N/m. *4.10. Draw a Simulink diagram to represent the system shown in Example 4.4. Plot the first 10 seconds of the response...
4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and x2 for the first 50 seconds when the applied force fal increases from 0 to 10 N at t = 1 s. The parameter values are M1 = M2 = 10 kg, B = 20 Ns/m, and Ki = K2 = 10 N/m. *4.10. Draw a Simulink diagram to represent the system shown in Example 4.4. Plot the first 10 seconds of the response...
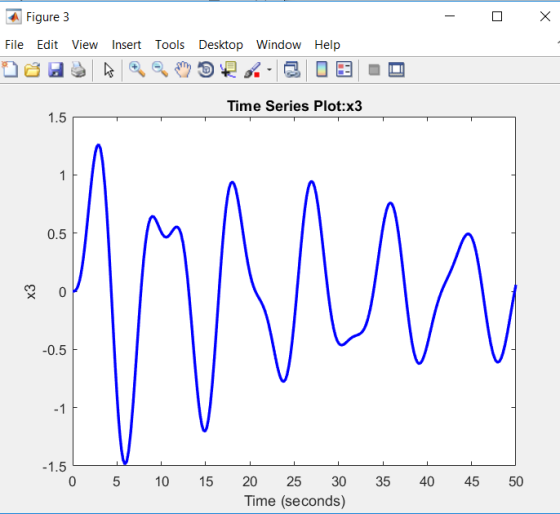
Mechanical vibration subject 3. a. Consider the system of Figure 3. If C1 = C2 =...
 Mechanical vibration subject
3. a. Consider the system of Figure 3. If C1 = C2 = C3 = 0, develops the equation of motion and predict the mass and stiffness matrices. Note that setting k3 = 0 in your solution should result in the stiffness matrix given by [ky + kz -k2 kz b. constructs the characteristics equation from Question 3(a) for the case m1 = 9 kg, m2 = 1 kg, k1 = 24 N/m, k2 = 3 N/m,...
Mechanical vibration subject
3. a. Consider the system of Figure 3. If C1 = C2 = C3 = 0, develops the equation of motion and predict the mass and stiffness matrices. Note that setting k3 = 0 in your solution should result in the stiffness matrix given by [ky + kz -k2 kz b. constructs the characteristics equation from Question 3(a) for the case m1 = 9 kg, m2 = 1 kg, k1 = 24 N/m, k2 = 3 N/m,...
We consider here, the two masses m1 and m2 connected this time by springs of stiffnesses...
 We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as shown in the figure
below. We denote x1 (t) and x2 (t) as the movement of each of the 2
masses relative to its position of equilibrium static.
1) Prove that the differential equation whose unknown is the displacement is written in the following form:
2) Deduce the second differential equation whose unknown is the
displacement
3) Determine the...
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as shown in the figure
below. We denote x1 (t) and x2 (t) as the movement of each of the 2
masses relative to its position of equilibrium static.
1) Prove that the differential equation whose unknown is the displacement is written in the following form:
2) Deduce the second differential equation whose unknown is the
displacement
3) Determine the...
We consider here, the two masses m1 and m2 connected this time by springs of stiffnesses...
 We consider here, the two masses m1 and m2
connected this time by springs of stiffnesses k1,
k2 and k3 as shown in the figure below. We
denote by x1(t) and x2(t) the movement of
each of the 2 masses relative to its position of equilibrium
static.
1. Prove that the differential equation whose unknown is the
displacement x1(t) is written in the following form: (3
points)
2. Deduce the second differential equation whose unknown is the
displacement x2(t) (3...
We consider here, the two masses m1 and m2
connected this time by springs of stiffnesses k1,
k2 and k3 as shown in the figure below. We
denote by x1(t) and x2(t) the movement of
each of the 2 masses relative to its position of equilibrium
static.
1. Prove that the differential equation whose unknown is the
displacement x1(t) is written in the following form: (3
points)
2. Deduce the second differential equation whose unknown is the
displacement x2(t) (3...
Differentiel equations We consider here, the two masses m1 and m2 connected this time by springs...
 Differentiel equations
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as indicated in the figure
below. We denote by x1 (t) and x2 (t) the movement of each of the 2
masses relative to its static equilibrium position.
1. Prove that the differential equation whose unknown is the
displacement x1 (t) is written in the following form:
2. Deduce the second differential equation whose unknown is the
displacement...
Differentiel equations
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as indicated in the figure
below. We denote by x1 (t) and x2 (t) the movement of each of the 2
masses relative to its static equilibrium position.
1. Prove that the differential equation whose unknown is the
displacement x1 (t) is written in the following form:
2. Deduce the second differential equation whose unknown is the
displacement...
Here we consider the two masses m1 and m2 connected this time by springs of stiffnesses...
 Here we consider the two masses m1 and m2 connected this time by
springs of stiffnesses k1, k2 and k3 as shown in the figure below.
The movement of each of the 2 masses relative to its position of
static equilibrium is designated by x1(t) and x2(t).
1. Demonstrate that the differential equation whose unknown is
the displacement x1(t) is written as follows:
2. Determine the second differential equation whose unknown is
the displacement x2(t).
3. Determine the free oscillatory...
Here we consider the two masses m1 and m2 connected this time by
springs of stiffnesses k1, k2 and k3 as shown in the figure below.
The movement of each of the 2 masses relative to its position of
static equilibrium is designated by x1(t) and x2(t).
1. Demonstrate that the differential equation whose unknown is
the displacement x1(t) is written as follows:
2. Determine the second differential equation whose unknown is
the displacement x2(t).
3. Determine the free oscillatory...
 Use MATLAB Simulink
Use a similar way to this: (the picture from the left is cut a
little)
Use MATLAB Simulink to build the block diagram for the system M m x2 +kı (x2-u) + Kz (x2-x1) + k3 (x2-x) = 0 m_x3 + k} (x3 – x2) = 0 kz (x2 – x1) = c(*. - ů) YA 1417 ДА | AA
Use MATLAB Simulink
Use a similar way to this: (the picture from the left is cut a
little)
Use MATLAB Simulink to build the block diagram for the system M m x2 +kı (x2-u) + Kz (x2-x1) + k3 (x2-x) = 0 m_x3 + k} (x3 – x2) = 0 kz (x2 – x1) = c(*. - ů) YA 1417 ДА | AA
 4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and x2 for the first 50 seconds when the applied force fal increases from 0 to 10 N at t = 1 s. The parameter values are M1 = M2 = 10 kg, B = 20 Ns/m, and Ki = K2 = 10 N/m. *4.10. Draw a Simulink diagram to represent the system shown in Example 4.4. Plot the first 10 seconds of the response...
4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and x2 for the first 50 seconds when the applied force fal increases from 0 to 10 N at t = 1 s. The parameter values are M1 = M2 = 10 kg, B = 20 Ns/m, and Ki = K2 = 10 N/m. *4.10. Draw a Simulink diagram to represent the system shown in Example 4.4. Plot the first 10 seconds of the response...
 Mechanical vibration subject
3. a. Consider the system of Figure 3. If C1 = C2 = C3 = 0, develops the equation of motion and predict the mass and stiffness matrices. Note that setting k3 = 0 in your solution should result in the stiffness matrix given by [ky + kz -k2 kz b. constructs the characteristics equation from Question 3(a) for the case m1 = 9 kg, m2 = 1 kg, k1 = 24 N/m, k2 = 3 N/m,...
Mechanical vibration subject
3. a. Consider the system of Figure 3. If C1 = C2 = C3 = 0, develops the equation of motion and predict the mass and stiffness matrices. Note that setting k3 = 0 in your solution should result in the stiffness matrix given by [ky + kz -k2 kz b. constructs the characteristics equation from Question 3(a) for the case m1 = 9 kg, m2 = 1 kg, k1 = 24 N/m, k2 = 3 N/m,...
 We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as shown in the figure
below. We denote x1 (t) and x2 (t) as the movement of each of the 2
masses relative to its position of equilibrium static.
1) Prove that the differential equation whose unknown is the displacement is written in the following form:
2) Deduce the second differential equation whose unknown is the
displacement
3) Determine the...
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as shown in the figure
below. We denote x1 (t) and x2 (t) as the movement of each of the 2
masses relative to its position of equilibrium static.
1) Prove that the differential equation whose unknown is the displacement is written in the following form:
2) Deduce the second differential equation whose unknown is the
displacement
3) Determine the...
 We consider here, the two masses m1 and m2
connected this time by springs of stiffnesses k1,
k2 and k3 as shown in the figure below. We
denote by x1(t) and x2(t) the movement of
each of the 2 masses relative to its position of equilibrium
static.
1. Prove that the differential equation whose unknown is the
displacement x1(t) is written in the following form: (3
points)
2. Deduce the second differential equation whose unknown is the
displacement x2(t) (3...
We consider here, the two masses m1 and m2
connected this time by springs of stiffnesses k1,
k2 and k3 as shown in the figure below. We
denote by x1(t) and x2(t) the movement of
each of the 2 masses relative to its position of equilibrium
static.
1. Prove that the differential equation whose unknown is the
displacement x1(t) is written in the following form: (3
points)
2. Deduce the second differential equation whose unknown is the
displacement x2(t) (3...
 Differentiel equations
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as indicated in the figure
below. We denote by x1 (t) and x2 (t) the movement of each of the 2
masses relative to its static equilibrium position.
1. Prove that the differential equation whose unknown is the
displacement x1 (t) is written in the following form:
2. Deduce the second differential equation whose unknown is the
displacement...
Differentiel equations
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as indicated in the figure
below. We denote by x1 (t) and x2 (t) the movement of each of the 2
masses relative to its static equilibrium position.
1. Prove that the differential equation whose unknown is the
displacement x1 (t) is written in the following form:
2. Deduce the second differential equation whose unknown is the
displacement...
 Here we consider the two masses m1 and m2 connected this time by
springs of stiffnesses k1, k2 and k3 as shown in the figure below.
The movement of each of the 2 masses relative to its position of
static equilibrium is designated by x1(t) and x2(t).
1. Demonstrate that the differential equation whose unknown is
the displacement x1(t) is written as follows:
2. Determine the second differential equation whose unknown is
the displacement x2(t).
3. Determine the free oscillatory...
Here we consider the two masses m1 and m2 connected this time by
springs of stiffnesses k1, k2 and k3 as shown in the figure below.
The movement of each of the 2 masses relative to its position of
static equilibrium is designated by x1(t) and x2(t).
1. Demonstrate that the differential equation whose unknown is
the displacement x1(t) is written as follows:
2. Determine the second differential equation whose unknown is
the displacement x2(t).
3. Determine the free oscillatory...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 11 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 11 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 11 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 11 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 11 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 11 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 11 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 11 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 11 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 11 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 11 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 11 months ago