G (s) = K / (s (s + 2)), H (s) = 2 is given. Perform...
G (s) = K / (s (s + 2)), H (s) = 2 is given. Perform the stability analysis of the negative feedback closed loop system on the frequency plane. Calculate the dividend and phase share.
Homework Answers
Closed-Loop transfer function:





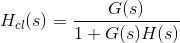
The Open loop gain is:

The system shows a pole in s=-2

By the Nyquist stability criterion:
-1 pole in the left side of the imaginary plane
-Characteristic equation has no poles on the right side of the imaginary plane.
The system is stable
The magnitude of the closed-loop is:

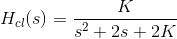




The phase is:

Please do part A and show all work. Thanks! FREQUENCY RESPONSE ANALYSis zeros mined by examinin of G(s)H (in has open-loop sponse stability should be determined by a) i A non-minimum-phase system rig...
 Please do part A and show all work. Thanks!
FREQUENCY RESPONSE ANALYSis zeros mined by examinin of G(s)H (in has open-loop sponse stability should be determined by a) i A non-minimum-phase system right half-plane. Frequency the entire Nyquist plor DRILL PROBLEMS D6.9 Find gain margins and phase margins (if they exist) for feedback with the following loop transmittances: 2000 G(s)H(s)- (s +2)(s + 7(s +16) Ans. 5.4 dB. 20 20 G(s)H(6)( +7s + 140) Ans. 33.8 dB, 89 -s Note:...
Please do part A and show all work. Thanks!
FREQUENCY RESPONSE ANALYSis zeros mined by examinin of G(s)H (in has open-loop sponse stability should be determined by a) i A non-minimum-phase system right half-plane. Frequency the entire Nyquist plor DRILL PROBLEMS D6.9 Find gain margins and phase margins (if they exist) for feedback with the following loop transmittances: 2000 G(s)H(s)- (s +2)(s + 7(s +16) Ans. 5.4 dB. 20 20 G(s)H(6)( +7s + 140) Ans. 33.8 dB, 89 -s Note:...
Consider a negative feedback system whose open-loop transfer function is: G(s)H(s)=K/(s(s+1)) Write a MATLAB program to...
Consider a negative feedback system whose open-loop transfer function is: G(s)H(s)=K/(s(s+1)) Write a MATLAB program to obtain the root-locus plot of G(s)H(s). [2 marks] What are the locations of poles when K = 0.19. [2 marks] When K = 0.4, what are the locations of poles? [3 marks] Find values of the damping ratio, % overshoot and frequency when K = 0.4. [3 marks] Write a MATLAB program to obtain a bode plot of G(s)H(s) when K = 1. [2...
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the st...
 . S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)=...
 A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)= 3(s+a) Y(s) R(s) G(s) К H(s) Figure 4.1 A feedback control system with adjustable gain Sketch Nyquist plot for G(s)H(s) for 0.9 <a < 1.1. (a) (18 marks) (b) Discuss the stability of closed-loop system with open-loop function as in (a) if K 10b (7 marks)
A feedback control system with adjustable gain K...
A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)= 3(s+a) Y(s) R(s) G(s) К H(s) Figure 4.1 A feedback control system with adjustable gain Sketch Nyquist plot for G(s)H(s) for 0.9 <a < 1.1. (a) (18 marks) (b) Discuss the stability of closed-loop system with open-loop function as in (a) if K 10b (7 marks)
A feedback control system with adjustable gain K...
QUESTION 2 Given that a control system has a forward path of G(s) and negative unity...
 QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
The open loop transfer function of an electro-mechanical system with unity feedback is: 24K G(s) S(s+2)(s +6) The Nyquist diagram of G(s) has a shape similar to the one shown below Nyquist diagram Cl...
 The open loop transfer function of an electro-mechanical system with unity feedback is: 24K G(s) S(s+2)(s +6) The Nyquist diagram of G(s) has a shape similar to the one shown below Nyquist diagram Cl When K -1, calculate both the frequency and the gain at which the plot crosses the real axis Hence state the gain margin or critical gain Kc for this system. If K is chosen as K-0.2Kc, show that the gain G(jo) l at a frequency ω-1.308...
The open loop transfer function of an electro-mechanical system with unity feedback is: 24K G(s) S(s+2)(s +6) The Nyquist diagram of G(s) has a shape similar to the one shown below Nyquist diagram Cl When K -1, calculate both the frequency and the gain at which the plot crosses the real axis Hence state the gain margin or critical gain Kc for this system. If K is chosen as K-0.2Kc, show that the gain G(jo) l at a frequency ω-1.308...
A2. (a) Explain how the open-loop polar plot can be used to assess closed-loop stability by...
 A2. (a) Explain how the open-loop polar plot can be used to assess closed-loop stability by applying Nyquist's stability criterion. Apply Nyquist's stability criterion to determine the stability condition for a closed-loop system that is unstable in the open-loop. [30%] = K (b) An unstable system has transfer function given by G(S) in which the gain K is S(S-2) positive. A derivative compensator H(s) = 0.5s + 1 is inserted in the negative feedback path to form a control loop....
A2. (a) Explain how the open-loop polar plot can be used to assess closed-loop stability by applying Nyquist's stability criterion. Apply Nyquist's stability criterion to determine the stability condition for a closed-loop system that is unstable in the open-loop. [30%] = K (b) An unstable system has transfer function given by G(S) in which the gain K is S(S-2) positive. A derivative compensator H(s) = 0.5s + 1 is inserted in the negative feedback path to form a control loop....
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
2. Consider a unity feedback control system whose open-loop transfer function is K(s-2) G(s) (s+1)(s +6s...
 2. Consider a unity feedback control system whose open-loop transfer function is K(s-2) G(s) (s+1)(s +6s +25) Using the R-H stability criterion, determine the range of K for stability. Assume that K > 0. (30pts)
2. Consider a unity feedback control system whose open-loop transfer function is K(s-2) G(s) (s+1)(s +6s +25) Using the R-H stability criterion, determine the range of K for stability. Assume that K > 0. (30pts)
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive c...
 Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
 Please do part A and show all work. Thanks!
FREQUENCY RESPONSE ANALYSis zeros mined by examinin of G(s)H (in has open-loop sponse stability should be determined by a) i A non-minimum-phase system right half-plane. Frequency the entire Nyquist plor DRILL PROBLEMS D6.9 Find gain margins and phase margins (if they exist) for feedback with the following loop transmittances: 2000 G(s)H(s)- (s +2)(s + 7(s +16) Ans. 5.4 dB. 20 20 G(s)H(6)( +7s + 140) Ans. 33.8 dB, 89 -s Note:...
Please do part A and show all work. Thanks!
FREQUENCY RESPONSE ANALYSis zeros mined by examinin of G(s)H (in has open-loop sponse stability should be determined by a) i A non-minimum-phase system right half-plane. Frequency the entire Nyquist plor DRILL PROBLEMS D6.9 Find gain margins and phase margins (if they exist) for feedback with the following loop transmittances: 2000 G(s)H(s)- (s +2)(s + 7(s +16) Ans. 5.4 dB. 20 20 G(s)H(6)( +7s + 140) Ans. 33.8 dB, 89 -s Note:...
 . S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
 A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)= 3(s+a) Y(s) R(s) G(s) К H(s) Figure 4.1 A feedback control system with adjustable gain Sketch Nyquist plot for G(s)H(s) for 0.9 <a < 1.1. (a) (18 marks) (b) Discuss the stability of closed-loop system with open-loop function as in (a) if K 10b (7 marks)
A feedback control system with adjustable gain K...
A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)= 3(s+a) Y(s) R(s) G(s) К H(s) Figure 4.1 A feedback control system with adjustable gain Sketch Nyquist plot for G(s)H(s) for 0.9 <a < 1.1. (a) (18 marks) (b) Discuss the stability of closed-loop system with open-loop function as in (a) if K 10b (7 marks)
A feedback control system with adjustable gain K...
 QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
 The open loop transfer function of an electro-mechanical system with unity feedback is: 24K G(s) S(s+2)(s +6) The Nyquist diagram of G(s) has a shape similar to the one shown below Nyquist diagram Cl When K -1, calculate both the frequency and the gain at which the plot crosses the real axis Hence state the gain margin or critical gain Kc for this system. If K is chosen as K-0.2Kc, show that the gain G(jo) l at a frequency ω-1.308...
The open loop transfer function of an electro-mechanical system with unity feedback is: 24K G(s) S(s+2)(s +6) The Nyquist diagram of G(s) has a shape similar to the one shown below Nyquist diagram Cl When K -1, calculate both the frequency and the gain at which the plot crosses the real axis Hence state the gain margin or critical gain Kc for this system. If K is chosen as K-0.2Kc, show that the gain G(jo) l at a frequency ω-1.308...
 A2. (a) Explain how the open-loop polar plot can be used to assess closed-loop stability by applying Nyquist's stability criterion. Apply Nyquist's stability criterion to determine the stability condition for a closed-loop system that is unstable in the open-loop. [30%] = K (b) An unstable system has transfer function given by G(S) in which the gain K is S(S-2) positive. A derivative compensator H(s) = 0.5s + 1 is inserted in the negative feedback path to form a control loop....
A2. (a) Explain how the open-loop polar plot can be used to assess closed-loop stability by applying Nyquist's stability criterion. Apply Nyquist's stability criterion to determine the stability condition for a closed-loop system that is unstable in the open-loop. [30%] = K (b) An unstable system has transfer function given by G(S) in which the gain K is S(S-2) positive. A derivative compensator H(s) = 0.5s + 1 is inserted in the negative feedback path to form a control loop....
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
 2. Consider a unity feedback control system whose open-loop transfer function is K(s-2) G(s) (s+1)(s +6s +25) Using the R-H stability criterion, determine the range of K for stability. Assume that K > 0. (30pts)
2. Consider a unity feedback control system whose open-loop transfer function is K(s-2) G(s) (s+1)(s +6s +25) Using the R-H stability criterion, determine the range of K for stability. Assume that K > 0. (30pts)
 Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago