It has to be answered using matlab and other programs as each section says
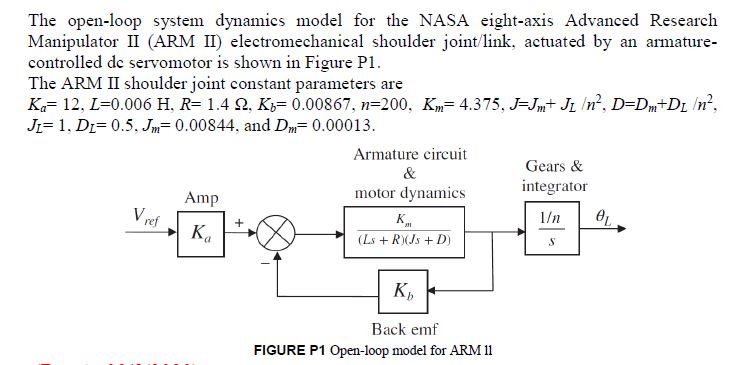
The open-loop system dynamics model for the NASA eight-axis Advanced Research Manipulator II (ARM II) electromechanical shoulder joint/link, actuated by an armature-controlled dc servomotor is shown in Figure P1.
The ARM II shoulder joint constant parameters are
Ka= 12, L=0.006 H, R= 1.4 Ω, Kb= 0.00867, n=200, Km= 4.375, J=Jm+ JL /n2, D=Dm+DL /n2, JL= 1, DL= 0.5, Jm= 0.00844, and Dm= 0.00013.
FIGURE P1 Open-loop model for ARM ll
(Due to 29/8/2020)
a. Obtain the equivalent open-loop transfer function, ?(?) (with a unity feedback system) (using MatLab or MatLab/Simulink).
b. The loop is to be closed by cascading a controller, Gc1(s) = KP, with G(s) in the forward path forming an equivalent forward-transfer function, Ge(s) = Gc1(s) G(s). Parameters of Gc1(s) will be used to design a desired transient performance. The input to the closed-loop system is a voltage, VI(s), representing the desired angular displacement of the robotic joint with a ratio of 1 volt equals 1 radian. The output of the closed-loop system is the actual angular displacement of the joint, θL(s). An encoder in the feedback path, Ke, converts the actual joint displacement to a voltage with a ratio of 1 radian equals 1 volt. Draw the closed loop system showing all transfer functions. (Use Microsoft PowerPoint or Visio to draw the system)
c. Find the closed-loop transfer function ?(?). (using MatLab or MatLab/Simulink).
d. Determine the range of KP for which the system is stable (using root locus technique).
e. Determine the step response for four different values of KP including stability and instability conditions (using MatLab or MatLab/Simulink).
f. Determine the transient parameters for a selected stable oscillatory response (rising time, settling time, overshoot (if exists) and compare and discuss the response (using MatLab or MatLab/Simulink). (choose a value for KP)
g. What is the min. steady state error of this system?
Homework Answers
Request Answer!
We need at least 6 more requests to produce the answer.
4 / 10 have requested this problem solution
The more requests, the faster the answer.
Add Answer to:
It has to be answered using matlab and other programs as each section says
Matlab control
 The open-loop system dynamics model for the NASA eight-axis Advanced Research Manipulator II (ARM II) electromechanical shoulder joint/link, actuated by an armature-controlled dc servomotor is shown in Figure P1.The ARM II shoulder joint constant parameters areKa= 12, L=0.006 H, R= 1.4 Ω, Kb= 0.00867, n=200, Km= 4.375, J=Jm+ JL /n2, D=Dm+DL /n2, JL= 1, DL= 0.5, Jm= 0.00844, and Dm= 0.00013.FIGURE P1 Open-loop model for ARM ll(Due to 29/8/2020)a. Obtain the equivalent open-loop transfer function, ?(?) (with a unity feedback...
The open-loop system dynamics model for the NASA eight-axis Advanced Research Manipulator II (ARM II) electromechanical shoulder joint/link, actuated by an armature-controlled dc servomotor is shown in Figure P1.The ARM II shoulder joint constant parameters areKa= 12, L=0.006 H, R= 1.4 Ω, Kb= 0.00867, n=200, Km= 4.375, J=Jm+ JL /n2, D=Dm+DL /n2, JL= 1, DL= 0.5, Jm= 0.00844, and Dm= 0.00013.FIGURE P1 Open-loop model for ARM ll(Due to 29/8/2020)a. Obtain the equivalent open-loop transfer function, ?(?) (with a unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer f...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k...
 3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Us...
 Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
Using matlab and simulink! Lab Assignment Solve the following problems using the Word and MATLAB. The...
 Using matlab and simulink!
Lab Assignment Solve the following problems using the Word and MATLAB. The table should be prepared in Word (Do not use MATLAB) for this. Use the MATLAB PUBLISH to submit your code. If you cannot, you may submit your report as a pdf form (prepare in word and save as pdf). The code, simulink model and figures should be included (print as a pdf or screen capture - consider readability). 1. Create the Simulink model as...
Using matlab and simulink!
Lab Assignment Solve the following problems using the Word and MATLAB. The table should be prepared in Word (Do not use MATLAB) for this. Use the MATLAB PUBLISH to submit your code. If you cannot, you may submit your report as a pdf form (prepare in word and save as pdf). The code, simulink model and figures should be included (print as a pdf or screen capture - consider readability). 1. Create the Simulink model as...
CP3.1 A unity feedback system is having an open loop ransfer function (s34) Using MATLAB (a)...
 CP3.1 A unity feedback system is having an open loop ransfer function (s34) Using MATLAB (a) Obtain closed-loop transfer function. (b) Obtain a state-space model. c) Using the state-space model obtain the unit step response
CP3.1 A unity feedback system is having an open loop ransfer function (s34) Using MATLAB (a) Obtain closed-loop transfer function. (b) Obtain a state-space model. c) Using the state-space model obtain the unit step response
Problem 4. Consider the control system shown below with plant G(s) that has time con- stants...
 Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
SOLVE USING MATLAB A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to desig...
 SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass...
 part 2 & part 3 please...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass-force system to study its behavior under various forms of PID control xtn fon force In Disturbance force: 50) (i.e. wind force) Part I (dealing with the plant/process) 1. What is the model of this system, in other words, write the ODE of the system 2. Derive the transfer function of the above system from Fls) to X(s) 3. What...
part 2 & part 3 please...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass-force system to study its behavior under various forms of PID control xtn fon force In Disturbance force: 50) (i.e. wind force) Part I (dealing with the plant/process) 1. What is the model of this system, in other words, write the ODE of the system 2. Derive the transfer function of the above system from Fls) to X(s) 3. What...
Can someone please show me how to perform this problem using MATLAB. My professor wants us to sim...
 Can someone please show me how to perform this problem using
MATLAB. My professor wants us to simulate this problem using MATLAB
and create the graph. Any help would
be very much appreciated.
Design three lead compensators for the system to reduce the settling factor by a factor of 2 while maintaining %30 overshoot for the system C(s) s(s 4) (s 6) Solution: Root-Locus and the desired pole location (-0.358 Desired compensated dominant pole -2.014 +j5.252 j5 j4 j3 j2...
Can someone please show me how to perform this problem using
MATLAB. My professor wants us to simulate this problem using MATLAB
and create the graph. Any help would
be very much appreciated.
Design three lead compensators for the system to reduce the settling factor by a factor of 2 while maintaining %30 overshoot for the system C(s) s(s 4) (s 6) Solution: Root-Locus and the desired pole location (-0.358 Desired compensated dominant pole -2.014 +j5.252 j5 j4 j3 j2...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
 3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
 Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
 Using matlab and simulink!
Lab Assignment Solve the following problems using the Word and MATLAB. The table should be prepared in Word (Do not use MATLAB) for this. Use the MATLAB PUBLISH to submit your code. If you cannot, you may submit your report as a pdf form (prepare in word and save as pdf). The code, simulink model and figures should be included (print as a pdf or screen capture - consider readability). 1. Create the Simulink model as...
Using matlab and simulink!
Lab Assignment Solve the following problems using the Word and MATLAB. The table should be prepared in Word (Do not use MATLAB) for this. Use the MATLAB PUBLISH to submit your code. If you cannot, you may submit your report as a pdf form (prepare in word and save as pdf). The code, simulink model and figures should be included (print as a pdf or screen capture - consider readability). 1. Create the Simulink model as...
 CP3.1 A unity feedback system is having an open loop ransfer function (s34) Using MATLAB (a) Obtain closed-loop transfer function. (b) Obtain a state-space model. c) Using the state-space model obtain the unit step response
CP3.1 A unity feedback system is having an open loop ransfer function (s34) Using MATLAB (a) Obtain closed-loop transfer function. (b) Obtain a state-space model. c) Using the state-space model obtain the unit step response
 Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
 SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
 part 2 & part 3 please...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass-force system to study its behavior under various forms of PID control xtn fon force In Disturbance force: 50) (i.e. wind force) Part I (dealing with the plant/process) 1. What is the model of this system, in other words, write the ODE of the system 2. Derive the transfer function of the above system from Fls) to X(s) 3. What...
part 2 & part 3 please...
Tutorial -On PID control (Control System: Instructor slides and lab) Consider a second order mass-force system to study its behavior under various forms of PID control xtn fon force In Disturbance force: 50) (i.e. wind force) Part I (dealing with the plant/process) 1. What is the model of this system, in other words, write the ODE of the system 2. Derive the transfer function of the above system from Fls) to X(s) 3. What...
 Can someone please show me how to perform this problem using
MATLAB. My professor wants us to simulate this problem using MATLAB
and create the graph. Any help would
be very much appreciated.
Design three lead compensators for the system to reduce the settling factor by a factor of 2 while maintaining %30 overshoot for the system C(s) s(s 4) (s 6) Solution: Root-Locus and the desired pole location (-0.358 Desired compensated dominant pole -2.014 +j5.252 j5 j4 j3 j2...
Can someone please show me how to perform this problem using
MATLAB. My professor wants us to simulate this problem using MATLAB
and create the graph. Any help would
be very much appreciated.
Design three lead compensators for the system to reduce the settling factor by a factor of 2 while maintaining %30 overshoot for the system C(s) s(s 4) (s 6) Solution: Root-Locus and the desired pole location (-0.358 Desired compensated dominant pole -2.014 +j5.252 j5 j4 j3 j2...
{kind=link}
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago