
Homework Answers
Add Answer to:
(d) Consider the system shown in Figure 3(d), it is desired to determine the values of...
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop pol...
 Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Find the dominant poles and gain K like they did in step 1 for the uncompensated system, EXCEPT D...
 Find the dominant poles and gain
K like they did in step 1 for the uncompensated
system, EXCEPT DO IT FOR 15% OVERSHOOT (zeta = 0.517) which is
121.13 degrees.
Show all work
Example 9.5 PID Controller Design PROBLEM: Given the system of Figure 9.31, design a PID controller so that the system can operate with a peak time that is two-thirds that of the uncompensated system at 20% overshoot and with zero steady-state error for a step input. R(s)Es)...
Find the dominant poles and gain
K like they did in step 1 for the uncompensated
system, EXCEPT DO IT FOR 15% OVERSHOOT (zeta = 0.517) which is
121.13 degrees.
Show all work
Example 9.5 PID Controller Design PROBLEM: Given the system of Figure 9.31, design a PID controller so that the system can operate with a peak time that is two-thirds that of the uncompensated system at 20% overshoot and with zero steady-state error for a step input. R(s)Es)...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with...
 1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues sati...
 3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
Consider a unity feedback control architecture where P(s) = 1/s^2 and C(s) = K * ((s + z)/(s + p)...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Problem 2: Output-feedback stabilization Consider the following system 0 -8 3-3 4 [2-92]z y = a)...
 Problem 2: Output-feedback stabilization Consider the following system 0 -8 3-3 4 [2-92]z y = a) Verify that the system is observable and controllable. Then, design an output-feedback controller (based on a full-order observer) by placing the poles of the closed loop system at -1 j, -3, 12 ±j2. and-30 (mention which desired poles you select for your observer design and why).
Problem 2: Output-feedback stabilization Consider the following system 0 -8 3-3 4 [2-92]z y = a) Verify that the system is observable and controllable. Then, design an output-feedback controller (based on a full-order observer) by placing the poles of the closed loop system at -1 j, -3, 12 ±j2. and-30 (mention which desired poles you select for your observer design and why).
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root lo...
 pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
Can you Solve in matlab please. I need your help B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value of K such that the damping ratio ζ of the d...
 Can you Solve in matlab please. I need your help
B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value of K such that the damping ratio ζ of the dominant closed-loop poles is 05. Then determine all closed-loop poles. Plot the unit-step response curve with MATLAB. s(s2 +4s +5) Figure 7-59 Control system.
B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value...
Can you Solve in matlab please. I need your help
B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value of K such that the damping ratio ζ of the dominant closed-loop poles is 05. Then determine all closed-loop poles. Plot the unit-step response curve with MATLAB. s(s2 +4s +5) Figure 7-59 Control system.
B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value...
Please solve by hand, NOT MATLAB.Consider the PID-controlled system shown in Figure 8–19. The PID...
 Please solve by hand, NOT MATLAB.Consider the PID-controlled system shown in Figure 8–19. The PID controller is given by Gc(s) = K (s + a)2 /S It is desired to find a combination of K and a such that the closed-loop system will have 10% (or less) maximum overshoot in the unit-step response. Assume that the region to search for K and a is
Please solve by hand, NOT MATLAB.Consider the PID-controlled system shown in Figure 8–19. The PID controller is given by Gc(s) = K (s + a)2 /S It is desired to find a combination of K and a such that the closed-loop system will have 10% (or less) maximum overshoot in the unit-step response. Assume that the region to search for K and a is
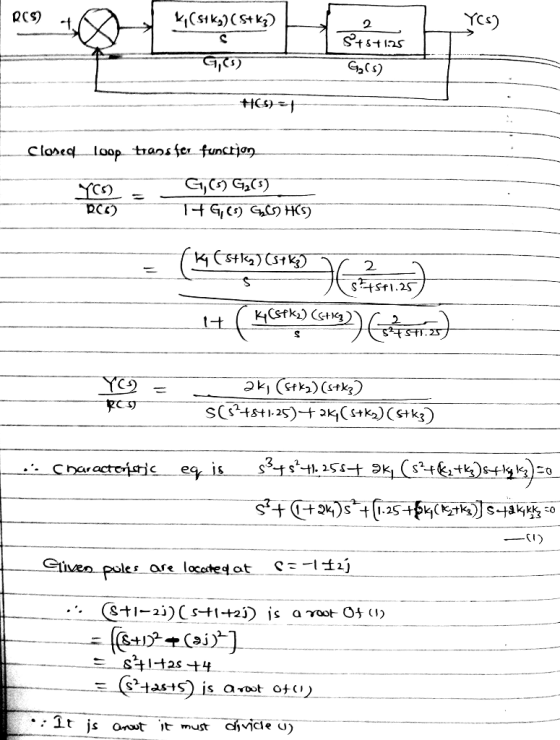
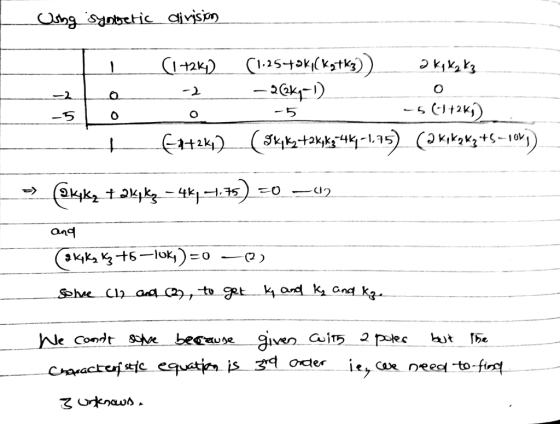
 Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
 Find the dominant poles and gain
K like they did in step 1 for the uncompensated
system, EXCEPT DO IT FOR 15% OVERSHOOT (zeta = 0.517) which is
121.13 degrees.
Show all work
Example 9.5 PID Controller Design PROBLEM: Given the system of Figure 9.31, design a PID controller so that the system can operate with a peak time that is two-thirds that of the uncompensated system at 20% overshoot and with zero steady-state error for a step input. R(s)Es)...
Find the dominant poles and gain
K like they did in step 1 for the uncompensated
system, EXCEPT DO IT FOR 15% OVERSHOOT (zeta = 0.517) which is
121.13 degrees.
Show all work
Example 9.5 PID Controller Design PROBLEM: Given the system of Figure 9.31, design a PID controller so that the system can operate with a peak time that is two-thirds that of the uncompensated system at 20% overshoot and with zero steady-state error for a step input. R(s)Es)...
 1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
 3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
 Problem 2: Output-feedback stabilization Consider the following system 0 -8 3-3 4 [2-92]z y = a) Verify that the system is observable and controllable. Then, design an output-feedback controller (based on a full-order observer) by placing the poles of the closed loop system at -1 j, -3, 12 ±j2. and-30 (mention which desired poles you select for your observer design and why).
Problem 2: Output-feedback stabilization Consider the following system 0 -8 3-3 4 [2-92]z y = a) Verify that the system is observable and controllable. Then, design an output-feedback controller (based on a full-order observer) by placing the poles of the closed loop system at -1 j, -3, 12 ±j2. and-30 (mention which desired poles you select for your observer design and why).
 pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
 Can you Solve in matlab please. I need your help
B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value of K such that the damping ratio ζ of the dominant closed-loop poles is 05. Then determine all closed-loop poles. Plot the unit-step response curve with MATLAB. s(s2 +4s +5) Figure 7-59 Control system.
B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value...
Can you Solve in matlab please. I need your help
B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value of K such that the damping ratio ζ of the dominant closed-loop poles is 05. Then determine all closed-loop poles. Plot the unit-step response curve with MATLAB. s(s2 +4s +5) Figure 7-59 Control system.
B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago