
Homework Answers



Thank you.
Add Answer to:
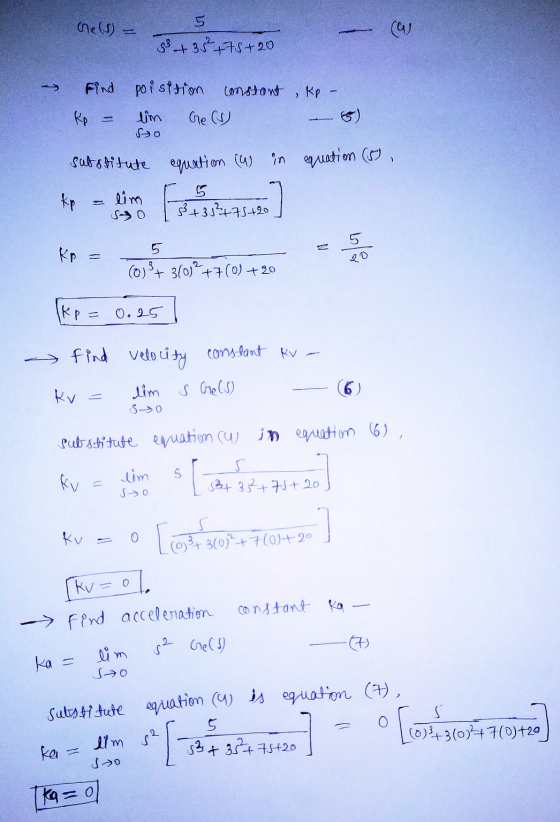
13. For the system shown in Figure P7.4, [Section: 7.3 a. Find Kp, K, and Ka...
For the system shown below state the system type, and find the steady state error for an input of...
 For the system shown below state the system type, and find the steady state error for an input of 50u(), 50rl(t), 5012U(t) 2. C(s) (s3) (Hint: Close the inner-loop first to get the standard unity feedback system with loop transfer function G(s)+3 +7s +15
For the system shown below state the system type, and find the steady state error for an input of 50u(), 50rl(t), 5012U(t) 2. C(s) (s3) (Hint: Close the inner-loop first to get the standard unity feedback...
For the system shown below state the system type, and find the steady state error for an input of 50u(), 50rl(t), 5012U(t) 2. C(s) (s3) (Hint: Close the inner-loop first to get the standard unity feedback system with loop transfer function G(s)+3 +7s +15
For the system shown below state the system type, and find the steady state error for an input of 50u(), 50rl(t), 5012U(t) 2. C(s) (s3) (Hint: Close the inner-loop first to get the standard unity feedback...
2. (disturbances & sensitivity) For the control system shown in the figure below, do the following:...
 2. (disturbances & sensitivity) For the control system shown in the figure below, do the following: i. Simplify the block diagram to form a negative unity feedback system ii. Determine the system type. ii. Find the steady-state error for r(t) 2tu(t) and d(t) 0 iv. Find the steady-state error for r(t) 0 and d(t) -0.2ut) v. Find the total error to both the input and the disturbance vi. Find the sensitivity of the total steady-state error to changes in Ki...
2. (disturbances & sensitivity) For the control system shown in the figure below, do the following: i. Simplify the block diagram to form a negative unity feedback system ii. Determine the system type. ii. Find the steady-state error for r(t) 2tu(t) and d(t) 0 iv. Find the steady-state error for r(t) 0 and d(t) -0.2ut) v. Find the total error to both the input and the disturbance vi. Find the sensitivity of the total steady-state error to changes in Ki...
10 Q.1 Figure Q1 shows a speed control system where Gi(s) 0.5s 1' and K(s)kp K(s) G,(s) Figure Q1: Speed Control System a) Determine the transfer function from d to y (4 marks) (b) Assuming the r...
 10 Q.1 Figure Q1 shows a speed control system where Gi(s) 0.5s 1' and K(s)kp K(s) G,(s) Figure Q1: Speed Control System a) Determine the transfer function from d to y (4 marks) (b) Assuming the reference is zero, what is the steady-state error (e-r - y), in this case, you want yss since r 0) due to an unit step disturbance in d? What must the value of k be in order to make the steady-state error less than...
10 Q.1 Figure Q1 shows a speed control system where Gi(s) 0.5s 1' and K(s)kp K(s) G,(s) Figure Q1: Speed Control System a) Determine the transfer function from d to y (4 marks) (b) Assuming the reference is zero, what is the steady-state error (e-r - y), in this case, you want yss since r 0) due to an unit step disturbance in d? What must the value of k be in order to make the steady-state error less than...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady...
 Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady...
 Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG...
 1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
help Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine...
 help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)-...
 6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem...
 R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2....
 Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
 For the system shown below state the system type, and find the steady state error for an input of 50u(), 50rl(t), 5012U(t) 2. C(s) (s3) (Hint: Close the inner-loop first to get the standard unity feedback system with loop transfer function G(s)+3 +7s +15
For the system shown below state the system type, and find the steady state error for an input of 50u(), 50rl(t), 5012U(t) 2. C(s) (s3) (Hint: Close the inner-loop first to get the standard unity feedback...
For the system shown below state the system type, and find the steady state error for an input of 50u(), 50rl(t), 5012U(t) 2. C(s) (s3) (Hint: Close the inner-loop first to get the standard unity feedback system with loop transfer function G(s)+3 +7s +15
For the system shown below state the system type, and find the steady state error for an input of 50u(), 50rl(t), 5012U(t) 2. C(s) (s3) (Hint: Close the inner-loop first to get the standard unity feedback...
 2. (disturbances & sensitivity) For the control system shown in the figure below, do the following: i. Simplify the block diagram to form a negative unity feedback system ii. Determine the system type. ii. Find the steady-state error for r(t) 2tu(t) and d(t) 0 iv. Find the steady-state error for r(t) 0 and d(t) -0.2ut) v. Find the total error to both the input and the disturbance vi. Find the sensitivity of the total steady-state error to changes in Ki...
2. (disturbances & sensitivity) For the control system shown in the figure below, do the following: i. Simplify the block diagram to form a negative unity feedback system ii. Determine the system type. ii. Find the steady-state error for r(t) 2tu(t) and d(t) 0 iv. Find the steady-state error for r(t) 0 and d(t) -0.2ut) v. Find the total error to both the input and the disturbance vi. Find the sensitivity of the total steady-state error to changes in Ki...
 10 Q.1 Figure Q1 shows a speed control system where Gi(s) 0.5s 1' and K(s)kp K(s) G,(s) Figure Q1: Speed Control System a) Determine the transfer function from d to y (4 marks) (b) Assuming the reference is zero, what is the steady-state error (e-r - y), in this case, you want yss since r 0) due to an unit step disturbance in d? What must the value of k be in order to make the steady-state error less than...
10 Q.1 Figure Q1 shows a speed control system where Gi(s) 0.5s 1' and K(s)kp K(s) G,(s) Figure Q1: Speed Control System a) Determine the transfer function from d to y (4 marks) (b) Assuming the reference is zero, what is the steady-state error (e-r - y), in this case, you want yss since r 0) due to an unit step disturbance in d? What must the value of k be in order to make the steady-state error less than...
 Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
 Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
 1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
 help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
 6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
 R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
 Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago