Could you please solve this question in a short time ?
Homework Answers



Add Answer to:
Could you please solve this question in a short time
?
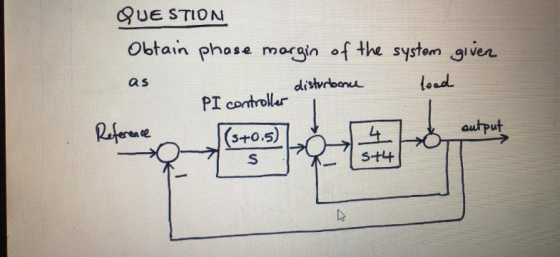
QUESTION Obtain phase margin of...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MAT...
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
could you please answer this question QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in...
 could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
Please code on MATLAB and explain D) only. Thank you The block diagram of a linear...
 Please code on MATLAB and explain D) only. Thank you
The block diagram of a linear control system is shown in the Fig., where r(t) is the reference input and n(t) is the disturbance. (a) Find the steady-state value of e(t) when n(t) = 0 and r(t) tuz(t). Find the conditions on the values of a and K so that the solution is valid. N(s) R(S) E(S) S + a K(s + 3) Y(s) S (5² - 1) Controller Process...
Please code on MATLAB and explain D) only. Thank you
The block diagram of a linear control system is shown in the Fig., where r(t) is the reference input and n(t) is the disturbance. (a) Find the steady-state value of e(t) when n(t) = 0 and r(t) tuz(t). Find the conditions on the values of a and K so that the solution is valid. N(s) R(S) E(S) S + a K(s + 3) Y(s) S (5² - 1) Controller Process...
PLEASE solve it with MATLAB code A unity feedback closed loop control system is displayed in...
 PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
could you please solve question 3? 2. Assume that the motion of Pi and P2 is...
 could you please solve question 3?
2. Assume that the motion of Pi and P2 is plane. Show that by putting P2 at the origin, and assuming 21 0, a position (x, y) of Pi can be described by the system of ODE Kk 2 k2mm2. (1) 3. By looking at the function of Hamilton (the total energy function) k2 m1 show that system (1) can be reduced to the canonical system of ODE ct where p x and q...
could you please solve question 3?
2. Assume that the motion of Pi and P2 is plane. Show that by putting P2 at the origin, and assuming 21 0, a position (x, y) of Pi can be described by the system of ODE Kk 2 k2mm2. (1) 3. By looking at the function of Hamilton (the total energy function) k2 m1 show that system (1) can be reduced to the canonical system of ODE ct where p x and q...
Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at...
 Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at 2.65 rad/sec.? B-Sketch the polar plot? 15 S(S+5) C- Sketch the Bode plot and show gain margin and phase margin? D-Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all, Examiners
Question ④ (20 marks) Consider...
Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at 2.65 rad/sec.? B-Sketch the polar plot? 15 S(S+5) C- Sketch the Bode plot and show gain margin and phase margin? D-Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all, Examiners
Question ④ (20 marks) Consider...
2) For the system below, find the phase margin if the system is stable for time...
 2) For the system below, find the phase margin if the system is stable for time delays of 0.1 and 0.2 second. Please use Matlab to plot the frequency response of G(s) (10 pts) Delay 50 (s +2s +5) G(s)
2) For the system below, find the phase margin if the system is stable for time delays of 0.1 and 0.2 second. Please use Matlab to plot the frequency response of G(s) (10 pts) Delay 50 (s +2s +5) G(s)
please solve as matlab code. The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C...
 please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
Hello, could you help me solve this question, please? Thank you very much! Question: (a) A...
Hello, could you help me solve this question, please? Thank you very much! Question: (a) A project has EIGHT (8) activities listed in the following table: Activity Immediate Predecessor (s) Time (Weeks) Activity Immediate Predecessor (s) Time (Weeks) A - 2 E C 3 B A 5 F C 7 C A 3 G D, E 2 D B 4 H F 3 (i) Use the GRAPH PAPER provided to construct a Gantt chart for the above project. [Note: You...
Could you please solve this problem? Solutions of wave equations are generally of the form: cos...
 Could you please solve this problem?
Solutions of wave equations are generally of the form: cos (Kx - omega t) where k = 2 pi/lambda and omega can (and usually does) depend on k, omega (k). This is a traveling wave. For a single., pure wave f(x, t) = A cos (kx - omega t). show that the whole wave moves in the +x direction at the speed v_whole wave = v_phase = omega/k. (How does a phase point, defined...
Could you please solve this problem?
Solutions of wave equations are generally of the form: cos (Kx - omega t) where k = 2 pi/lambda and omega can (and usually does) depend on k, omega (k). This is a traveling wave. For a single., pure wave f(x, t) = A cos (kx - omega t). show that the whole wave moves in the +x direction at the speed v_whole wave = v_phase = omega/k. (How does a phase point, defined...
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
 could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
 Please code on MATLAB and explain D) only. Thank you
The block diagram of a linear control system is shown in the Fig., where r(t) is the reference input and n(t) is the disturbance. (a) Find the steady-state value of e(t) when n(t) = 0 and r(t) tuz(t). Find the conditions on the values of a and K so that the solution is valid. N(s) R(S) E(S) S + a K(s + 3) Y(s) S (5² - 1) Controller Process...
Please code on MATLAB and explain D) only. Thank you
The block diagram of a linear control system is shown in the Fig., where r(t) is the reference input and n(t) is the disturbance. (a) Find the steady-state value of e(t) when n(t) = 0 and r(t) tuz(t). Find the conditions on the values of a and K so that the solution is valid. N(s) R(S) E(S) S + a K(s + 3) Y(s) S (5² - 1) Controller Process...
 PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
 could you please solve question 3?
2. Assume that the motion of Pi and P2 is plane. Show that by putting P2 at the origin, and assuming 21 0, a position (x, y) of Pi can be described by the system of ODE Kk 2 k2mm2. (1) 3. By looking at the function of Hamilton (the total energy function) k2 m1 show that system (1) can be reduced to the canonical system of ODE ct where p x and q...
could you please solve question 3?
2. Assume that the motion of Pi and P2 is plane. Show that by putting P2 at the origin, and assuming 21 0, a position (x, y) of Pi can be described by the system of ODE Kk 2 k2mm2. (1) 3. By looking at the function of Hamilton (the total energy function) k2 m1 show that system (1) can be reduced to the canonical system of ODE ct where p x and q...
 Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at 2.65 rad/sec.? B-Sketch the polar plot? 15 S(S+5) C- Sketch the Bode plot and show gain margin and phase margin? D-Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all, Examiners
Question ④ (20 marks) Consider...
Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at 2.65 rad/sec.? B-Sketch the polar plot? 15 S(S+5) C- Sketch the Bode plot and show gain margin and phase margin? D-Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all, Examiners
Question ④ (20 marks) Consider...
 2) For the system below, find the phase margin if the system is stable for time delays of 0.1 and 0.2 second. Please use Matlab to plot the frequency response of G(s) (10 pts) Delay 50 (s +2s +5) G(s)
2) For the system below, find the phase margin if the system is stable for time delays of 0.1 and 0.2 second. Please use Matlab to plot the frequency response of G(s) (10 pts) Delay 50 (s +2s +5) G(s)
 please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
 Could you please solve this problem?
Solutions of wave equations are generally of the form: cos (Kx - omega t) where k = 2 pi/lambda and omega can (and usually does) depend on k, omega (k). This is a traveling wave. For a single., pure wave f(x, t) = A cos (kx - omega t). show that the whole wave moves in the +x direction at the speed v_whole wave = v_phase = omega/k. (How does a phase point, defined...
Could you please solve this problem?
Solutions of wave equations are generally of the form: cos (Kx - omega t) where k = 2 pi/lambda and omega can (and usually does) depend on k, omega (k). This is a traveling wave. For a single., pure wave f(x, t) = A cos (kx - omega t). show that the whole wave moves in the +x direction at the speed v_whole wave = v_phase = omega/k. (How does a phase point, defined...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago