

Homework Answers


![Date: 1 पत [4]= KAMAU __ → _ - 24 22 - य 3 -4-24 - - =24-4, M4) = 224 - 2 24](http://img.homeworklib.com/questions/20853240-7dc6-11eb-b3d9-7ba6672444ab.png?x-oss-process=image/resize,w_560)
Add Answer to:
4 Let T:R? R'be the operator defined as T(v) = (v. du for a fixed unit...
Let V be a finite-dimensional vector space and let T L(V) be an operator. In this problem you sh...
Let V be a finite-dimensional vector space and let T L(V) be an operator. In this problem you show that there is a nonzero polynomial such that p(T) = 0. (a) What is 0 in this context? A polynomial? A linear map? An element of V? (b) Define by . Prove that is a linear map. (c) Prove that if where V is infinite-dimensional and W is finite-dimensional, then S cannot be injective. (d) Use the preceding parts to prove...
Let V be a Hilbert space. Let S1 and S2 be two hyperplanes in V defined by Let be given. We con...
Let V be a Hilbert space. Let S1 and S2 be two hyperplanes in V defined by Let be given. We consider the projection of y onto , i.e., the solution of (1) (a) Prove that is a plane, i.e., if , then for any . (b) Prove that z is a solution of (1) if and only if and (2) (c) Find an explicit solution of (1). ( d) Prove the solution found in part (c) is unique. We...
7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e....
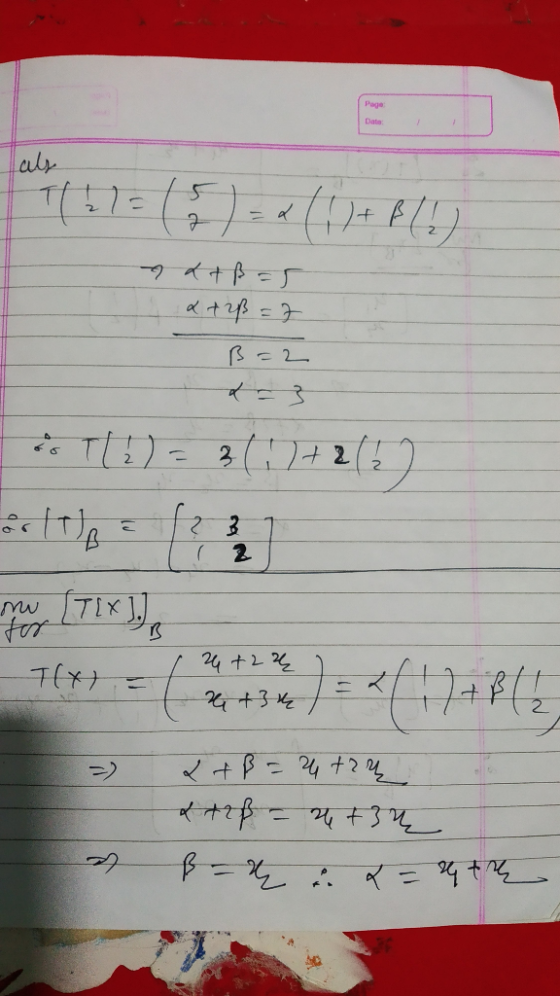
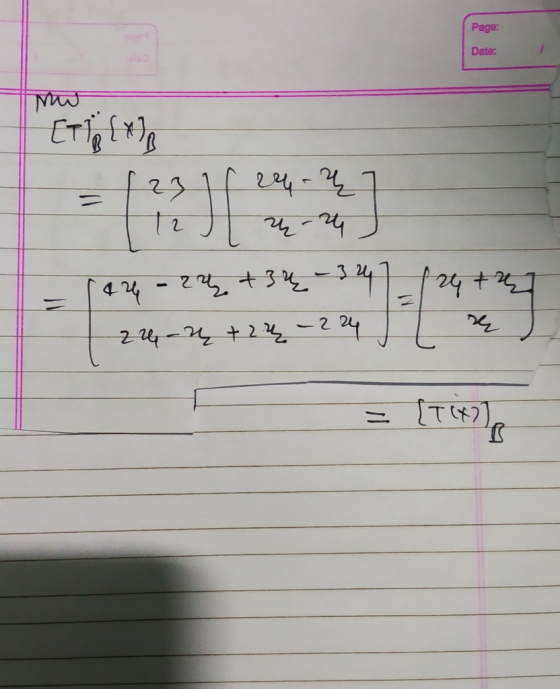
 7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e. V = span(B). Consider the linear transformation T:V + V defined by T(f(t)) = f"(t) – 2f'(t) – f(t). Find the standard matrix of the transformation. (Hint: Associate sin(t) with the vector (0), and so forth.) 8. Show that B = {t2 – 2, 3t2 +t, t+t+8} is a basis for P2, and find the change of coordinates matrix P which goes from B...
7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e. V = span(B). Consider the linear transformation T:V + V defined by T(f(t)) = f"(t) – 2f'(t) – f(t). Find the standard matrix of the transformation. (Hint: Associate sin(t) with the vector (0), and so forth.) 8. Show that B = {t2 – 2, 3t2 +t, t+t+8} is a basis for P2, and find the change of coordinates matrix P which goes from B...
Let V be R, with thestandard inner product. If is a unitary operator on V, show...
 Let V be R, with thestandard inner product. If is a unitary operator on V, show that the matrix of U in the standard ordered basis is either cos θ -sin θ sin θ cos θ cos θ sin θ for some real θ, 0-θ < 2T. Let Us be the linear operator corresponding to the first matrix, i.e., Ue is rotation through the angle . Now convince yourself that every unitary operator on V is either a rotation, or...
Let V be R, with thestandard inner product. If is a unitary operator on V, show that the matrix of U in the standard ordered basis is either cos θ -sin θ sin θ cos θ cos θ sin θ for some real θ, 0-θ < 2T. Let Us be the linear operator corresponding to the first matrix, i.e., Ue is rotation through the angle . Now convince yourself that every unitary operator on V is either a rotation, or...
3. Under the influence of a vector field a particle spirals on the surface of a unit sphere toward the (t)-t and ф(t)- uppermost pole. With its spherical angular positions parametrically defined by 2...
 3. Under the influence of a vector field a particle spirals on the surface of a unit sphere toward the (t)-t and ф(t)- uppermost pole. With its spherical angular positions parametrically defined by 24t, the particle's path can be defined t€[3m/2.2n. r(t)-sin(θ(t)) cos(d(t)) ị t sin(θ(t)) sin(φ(t))J+cos(θ(t)) k, Compute the work done by the constant vector field F(,y,z) 1 k in moving the particle along this path We were unable to transcribe this image
3. Under the influence of a...
3. Under the influence of a vector field a particle spirals on the surface of a unit sphere toward the (t)-t and ф(t)- uppermost pole. With its spherical angular positions parametrically defined by 24t, the particle's path can be defined t€[3m/2.2n. r(t)-sin(θ(t)) cos(d(t)) ị t sin(θ(t)) sin(φ(t))J+cos(θ(t)) k, Compute the work done by the constant vector field F(,y,z) 1 k in moving the particle along this path We were unable to transcribe this image
3. Under the influence of a...
For , let have an n-dimensional normal distribution . For any , let denote the vector...
For , let have an n-dimensional normal distribution . For any , let denote the vector consisting of the last n-m coordinates of . a. Find the mean vector and variance covariance matrix of b. Show that is a (n-m) dimensional normal random vector. We were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this...
Let T: V V and S: V V and R: V V be three linear operators...
 Let T: V
V and S: V
V and R: V
V be three linear operators on V. Suppose we have
T
S= S
R , Then prove ker(S) is an invariant subspace for R .
We were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this image
Let T: V
V and S: V
V and R: V
V be three linear operators on V. Suppose we have
T
S= S
R , Then prove ker(S) is an invariant subspace for R .
We were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this image
1. Let be the operator on whose matrix with respect to the standard basis is . a) Verify the result of proof " is normal if and only if for all " for question 1. Note: stands for adjoint...
1. Let be the operator on whose matrix with respect to the standard basis is . a) Verify the result of proof " is normal if and only if for all " for question 1. Note: stands for adjoint b) Verify the result of proof "Orthogonal eigenvectors for normal operators" for question 1. The proof states suppose is normal then eigenvectors of corresponding to distinct eigenvalues are orthogonal. We were unable to transcribe this imageWe were unable to transcribe this...
Let T: be defined as . Prove or disprove that can be written as the sum of two one-dimensional, T-invariant subspace...
Let T: be defined as . Prove or disprove that can be written as the sum of two one-dimensional, T-invariant subspaces. IR IR We were unable to transcribe this imageWe were unable to transcribe this image IR IR
5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is ...
 5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is called a vector operator. By "transforming the same way" we mean that V DV where D is the same matrix as appears in Dr. In particular for a rotation about the z axis we should have cos p-sinp0 sincos 0 0 where φ is the angle of rotation. This transformation rule follows frorn the generator of rotations where n is the unit...
5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is called a vector operator. By "transforming the same way" we mean that V DV where D is the same matrix as appears in Dr. In particular for a rotation about the z axis we should have cos p-sinp0 sincos 0 0 where φ is the angle of rotation. This transformation rule follows frorn the generator of rotations where n is the unit...
 7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e. V = span(B). Consider the linear transformation T:V + V defined by T(f(t)) = f"(t) – 2f'(t) – f(t). Find the standard matrix of the transformation. (Hint: Associate sin(t) with the vector (0), and so forth.) 8. Show that B = {t2 – 2, 3t2 +t, t+t+8} is a basis for P2, and find the change of coordinates matrix P which goes from B...
7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e. V = span(B). Consider the linear transformation T:V + V defined by T(f(t)) = f"(t) – 2f'(t) – f(t). Find the standard matrix of the transformation. (Hint: Associate sin(t) with the vector (0), and so forth.) 8. Show that B = {t2 – 2, 3t2 +t, t+t+8} is a basis for P2, and find the change of coordinates matrix P which goes from B...
 Let V be R, with thestandard inner product. If is a unitary operator on V, show that the matrix of U in the standard ordered basis is either cos θ -sin θ sin θ cos θ cos θ sin θ for some real θ, 0-θ < 2T. Let Us be the linear operator corresponding to the first matrix, i.e., Ue is rotation through the angle . Now convince yourself that every unitary operator on V is either a rotation, or...
Let V be R, with thestandard inner product. If is a unitary operator on V, show that the matrix of U in the standard ordered basis is either cos θ -sin θ sin θ cos θ cos θ sin θ for some real θ, 0-θ < 2T. Let Us be the linear operator corresponding to the first matrix, i.e., Ue is rotation through the angle . Now convince yourself that every unitary operator on V is either a rotation, or...
 3. Under the influence of a vector field a particle spirals on the surface of a unit sphere toward the (t)-t and ф(t)- uppermost pole. With its spherical angular positions parametrically defined by 24t, the particle's path can be defined t€[3m/2.2n. r(t)-sin(θ(t)) cos(d(t)) ị t sin(θ(t)) sin(φ(t))J+cos(θ(t)) k, Compute the work done by the constant vector field F(,y,z) 1 k in moving the particle along this path We were unable to transcribe this image
3. Under the influence of a...
3. Under the influence of a vector field a particle spirals on the surface of a unit sphere toward the (t)-t and ф(t)- uppermost pole. With its spherical angular positions parametrically defined by 24t, the particle's path can be defined t€[3m/2.2n. r(t)-sin(θ(t)) cos(d(t)) ị t sin(θ(t)) sin(φ(t))J+cos(θ(t)) k, Compute the work done by the constant vector field F(,y,z) 1 k in moving the particle along this path We were unable to transcribe this image
3. Under the influence of a...
 Let T: V
V and S: V
V and R: V
V be three linear operators on V. Suppose we have
T
S= S
R , Then prove ker(S) is an invariant subspace for R .
We were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this image
Let T: V
V and S: V
V and R: V
V be three linear operators on V. Suppose we have
T
S= S
R , Then prove ker(S) is an invariant subspace for R .
We were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this imageWe were unable to transcribe this image
 5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is called a vector operator. By "transforming the same way" we mean that V DV where D is the same matrix as appears in Dr. In particular for a rotation about the z axis we should have cos p-sinp0 sincos 0 0 where φ is the angle of rotation. This transformation rule follows frorn the generator of rotations where n is the unit...
5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is called a vector operator. By "transforming the same way" we mean that V DV where D is the same matrix as appears in Dr. In particular for a rotation about the z axis we should have cos p-sinp0 sincos 0 0 where φ is the angle of rotation. This transformation rule follows frorn the generator of rotations where n is the unit...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago