
Homework Answers



Add Answer to:
Suppose that the system function of an LTI system is 1+z H(z)=7 (1-12 '\1-22-X1 - 3z-")...
A discrete-time LTI system has the system function H(z) given below: 2 H(z (a) Sketch the...
 A discrete-time LTI system has the system function H(z) given below: 2 H(z (a) Sketch the pole-zero plot for this system. How many possible (ROCs) are there for H(z). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to (b) Which ROC (or ROCs) correspond to a stable system? Why? (c) Which ROC (or ROCs) correspond to a causal system? Why? (d) Write a difference equation that relates the input to the output...
A discrete-time LTI system has the system function H(z) given below: 2 H(z (a) Sketch the pole-zero plot for this system. How many possible (ROCs) are there for H(z). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to (b) Which ROC (or ROCs) correspond to a stable system? Why? (c) Which ROC (or ROCs) correspond to a causal system? Why? (d) Write a difference equation that relates the input to the output...
A discrete-time LTI system has the system function H(z) given below:
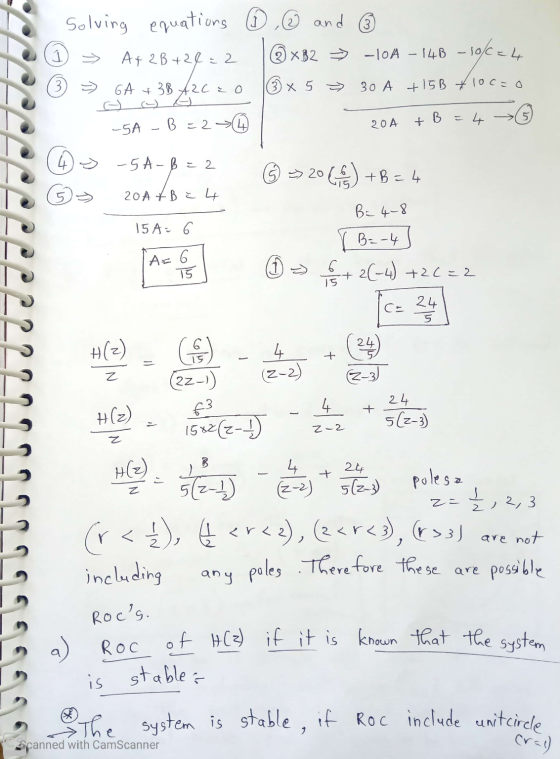
 A discrete-time LTI system has the system function \(H(z)\) given below:$$ H(z)=\frac{z^{2}}{z^{2}-\frac{1}{4}} $$(a) Sketch the pole-zero plot for this system. How many possible regions of convergence (ROCs) are there for \(H(z)\). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to.(b) Which ROC (or ROCs) correspond to a stable system? Why?(c) Which ROC (or ROCs) correspond to a causal system? Why?(d) Write a difference equation that relates the input to the output of...
A discrete-time LTI system has the system function \(H(z)\) given below:$$ H(z)=\frac{z^{2}}{z^{2}-\frac{1}{4}} $$(a) Sketch the pole-zero plot for this system. How many possible regions of convergence (ROCs) are there for \(H(z)\). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to.(b) Which ROC (or ROCs) correspond to a stable system? Why?(c) Which ROC (or ROCs) correspond to a causal system? Why?(d) Write a difference equation that relates the input to the output of...
Consider an LTI system for which the system (transfer) function H(s) has a zero at s=2...
Consider an LTI system for which the system (transfer) function H(s) has a zero at s=2 and poles at s=-12, -7, -6. If the system is known to be causal and stable, choose the ROC associated with the given system function. *
7. A causal LTI system has a transfer function given by H (z) = -1 (1...
 7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
For the following transfer function of an LTI system: Q.3) For the following transfer function of an ITI system: 8-5 (a...
 For the following transfer function of an LTI system:
Q.3) For the following transfer function of an ITI system: 8-5 (a) Sketch the pole-zero plot. (b) If the system is stable, determine the large Why. st pssible ROC. Is the systeu causal? Explairn (c) If the system is causal, determine the lar gest possible ROC. Is the system stable? Explain
Q.3) For the following transfer function of an ITI system: 8-5 (a) Sketch the pole-zero plot. (b) If the system...
For the following transfer function of an LTI system:
Q.3) For the following transfer function of an ITI system: 8-5 (a) Sketch the pole-zero plot. (b) If the system is stable, determine the large Why. st pssible ROC. Is the systeu causal? Explairn (c) If the system is causal, determine the lar gest possible ROC. Is the system stable? Explain
Q.3) For the following transfer function of an ITI system: 8-5 (a) Sketch the pole-zero plot. (b) If the system...
8. An LTI system is characterized by the following system function: H (z) = (a) Find...
 8. An LTI system is characterized by the following system function: H (z) = (a) Find the difference equation that describes this system (b) Is the system causal? Why or why not? (c) Is the system stable? Why or why not? (d) Suppose the input to the system is given by rn] (1/3)un. Find the output of the system
8. An LTI system is characterized by the following system function: H (z) = (a) Find the difference equation that describes this system (b) Is the system causal? Why or why not? (c) Is the system stable? Why or why not? (d) Suppose the input to the system is given by rn] (1/3)un. Find the output of the system
A continuous-time LTI system has unit impulse response h(t). The Laplace transform of h(t), also called...
 A continuous-time LTI system has unit impulse response h(t). The
Laplace transform of h(t), also called the “transfer function” of
the LTI system, is
.
For each of the following cases, determine the region of
convergence (ROC) for H(s) and the corresponding h(t), and
determine whether the Fourier transform of h(t) exists.
(a) The LTI system is causal but not stable.
(b) The LTI system is stable but not causal.
(c) The LTI system is neither stable nor causal
8...
A continuous-time LTI system has unit impulse response h(t). The
Laplace transform of h(t), also called the “transfer function” of
the LTI system, is
.
For each of the following cases, determine the region of
convergence (ROC) for H(s) and the corresponding h(t), and
determine whether the Fourier transform of h(t) exists.
(a) The LTI system is causal but not stable.
(b) The LTI system is stable but not causal.
(c) The LTI system is neither stable nor causal
8...
1. A discrete-time LTI system has the system function H() given below: (a) Sketch the pole-zero...
 1. A discrete-time LTI system has the system function H() given below: (a) Sketch the pole-zero plot for this system How many possible regions of convergence (ROCs) are there for H(). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to. (b) Which ROC (or ROCs) correspond to a stable system Why? (c) Which ROC (or ROCs) correspond to a causal system? Why? (d) Write a difference equation that relates the input to...
1. A discrete-time LTI system has the system function H() given below: (a) Sketch the pole-zero plot for this system How many possible regions of convergence (ROCs) are there for H(). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to. (b) Which ROC (or ROCs) correspond to a stable system Why? (c) Which ROC (or ROCs) correspond to a causal system? Why? (d) Write a difference equation that relates the input to...
Problem 3 Assume a system function of an LTI system is H(-) =(257-6 The input to...
 Problem 3 Assume a system function of an LTI system is H(-) =(257-6 The input to the system x(n) = 3"u(n). Assuming y(n) and Y(z) are the Z-transform pair, and y(n) is the output of the above system: a) determine Y(z) assuming ROC of H(z) is z/>3 b) Determine y(n) by inverting Y(z) using the method of residuals (assuming ROC of H(z) is [z/>3) c) What is the ROC of a stable system given by H(z) ? d) What is...
Problem 3 Assume a system function of an LTI system is H(-) =(257-6 The input to the system x(n) = 3"u(n). Assuming y(n) and Y(z) are the Z-transform pair, and y(n) is the output of the above system: a) determine Y(z) assuming ROC of H(z) is z/>3 b) Determine y(n) by inverting Y(z) using the method of residuals (assuming ROC of H(z) is [z/>3) c) What is the ROC of a stable system given by H(z) ? d) What is...
LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system...
 LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system is non-causal and un-stable, determine the time domain impulse response
LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system is non-causal and un-stable, determine the time domain impulse response
 A discrete-time LTI system has the system function H(z) given below: 2 H(z (a) Sketch the pole-zero plot for this system. How many possible (ROCs) are there for H(z). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to (b) Which ROC (or ROCs) correspond to a stable system? Why? (c) Which ROC (or ROCs) correspond to a causal system? Why? (d) Write a difference equation that relates the input to the output...
A discrete-time LTI system has the system function H(z) given below: 2 H(z (a) Sketch the pole-zero plot for this system. How many possible (ROCs) are there for H(z). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to (b) Which ROC (or ROCs) correspond to a stable system? Why? (c) Which ROC (or ROCs) correspond to a causal system? Why? (d) Write a difference equation that relates the input to the output...
 A discrete-time LTI system has the system function \(H(z)\) given below:$$ H(z)=\frac{z^{2}}{z^{2}-\frac{1}{4}} $$(a) Sketch the pole-zero plot for this system. How many possible regions of convergence (ROCs) are there for \(H(z)\). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to.(b) Which ROC (or ROCs) correspond to a stable system? Why?(c) Which ROC (or ROCs) correspond to a causal system? Why?(d) Write a difference equation that relates the input to the output of...
A discrete-time LTI system has the system function \(H(z)\) given below:$$ H(z)=\frac{z^{2}}{z^{2}-\frac{1}{4}} $$(a) Sketch the pole-zero plot for this system. How many possible regions of convergence (ROCs) are there for \(H(z)\). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to.(b) Which ROC (or ROCs) correspond to a stable system? Why?(c) Which ROC (or ROCs) correspond to a causal system? Why?(d) Write a difference equation that relates the input to the output of...
 7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
 For the following transfer function of an LTI system:
Q.3) For the following transfer function of an ITI system: 8-5 (a) Sketch the pole-zero plot. (b) If the system is stable, determine the large Why. st pssible ROC. Is the systeu causal? Explairn (c) If the system is causal, determine the lar gest possible ROC. Is the system stable? Explain
Q.3) For the following transfer function of an ITI system: 8-5 (a) Sketch the pole-zero plot. (b) If the system...
For the following transfer function of an LTI system:
Q.3) For the following transfer function of an ITI system: 8-5 (a) Sketch the pole-zero plot. (b) If the system is stable, determine the large Why. st pssible ROC. Is the systeu causal? Explairn (c) If the system is causal, determine the lar gest possible ROC. Is the system stable? Explain
Q.3) For the following transfer function of an ITI system: 8-5 (a) Sketch the pole-zero plot. (b) If the system...
 8. An LTI system is characterized by the following system function: H (z) = (a) Find the difference equation that describes this system (b) Is the system causal? Why or why not? (c) Is the system stable? Why or why not? (d) Suppose the input to the system is given by rn] (1/3)un. Find the output of the system
8. An LTI system is characterized by the following system function: H (z) = (a) Find the difference equation that describes this system (b) Is the system causal? Why or why not? (c) Is the system stable? Why or why not? (d) Suppose the input to the system is given by rn] (1/3)un. Find the output of the system
 A continuous-time LTI system has unit impulse response h(t). The
Laplace transform of h(t), also called the “transfer function” of
the LTI system, is
.
For each of the following cases, determine the region of
convergence (ROC) for H(s) and the corresponding h(t), and
determine whether the Fourier transform of h(t) exists.
(a) The LTI system is causal but not stable.
(b) The LTI system is stable but not causal.
(c) The LTI system is neither stable nor causal
8...
A continuous-time LTI system has unit impulse response h(t). The
Laplace transform of h(t), also called the “transfer function” of
the LTI system, is
.
For each of the following cases, determine the region of
convergence (ROC) for H(s) and the corresponding h(t), and
determine whether the Fourier transform of h(t) exists.
(a) The LTI system is causal but not stable.
(b) The LTI system is stable but not causal.
(c) The LTI system is neither stable nor causal
8...
 1. A discrete-time LTI system has the system function H() given below: (a) Sketch the pole-zero plot for this system How many possible regions of convergence (ROCs) are there for H(). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to. (b) Which ROC (or ROCs) correspond to a stable system Why? (c) Which ROC (or ROCs) correspond to a causal system? Why? (d) Write a difference equation that relates the input to...
1. A discrete-time LTI system has the system function H() given below: (a) Sketch the pole-zero plot for this system How many possible regions of convergence (ROCs) are there for H(). List the possible ROCs and indicate what type of sequence (left-sided, right-sided, two-sided, finite-length) they correspond to. (b) Which ROC (or ROCs) correspond to a stable system Why? (c) Which ROC (or ROCs) correspond to a causal system? Why? (d) Write a difference equation that relates the input to...
 Problem 3 Assume a system function of an LTI system is H(-) =(257-6 The input to the system x(n) = 3"u(n). Assuming y(n) and Y(z) are the Z-transform pair, and y(n) is the output of the above system: a) determine Y(z) assuming ROC of H(z) is z/>3 b) Determine y(n) by inverting Y(z) using the method of residuals (assuming ROC of H(z) is [z/>3) c) What is the ROC of a stable system given by H(z) ? d) What is...
Problem 3 Assume a system function of an LTI system is H(-) =(257-6 The input to the system x(n) = 3"u(n). Assuming y(n) and Y(z) are the Z-transform pair, and y(n) is the output of the above system: a) determine Y(z) assuming ROC of H(z) is z/>3 b) Determine y(n) by inverting Y(z) using the method of residuals (assuming ROC of H(z) is [z/>3) c) What is the ROC of a stable system given by H(z) ? d) What is...
 LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system is non-causal and un-stable, determine the time domain impulse response
LTI Systems-Stability Consider an LTI system with system function: s-1 H (s) = If the system is non-causal and un-stable, determine the time domain impulse response
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago