I understand most o f the problem. I manly need help with the plots for part a and c. My teacher requires me to use matlab to plot them.
Homework Answers

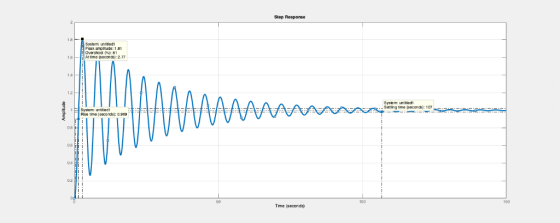
 matlab code for step
response:
matlab code for step
response:
clc;
clear all;
close all;
s=tf('s');
g=2*(s+2)/(s*(s+1)*(1+2*s));% plant and controller transfer function
step(feedback(g,1));grid % step response of compensated system
Add Answer to:
I understand most o f the problem. I manly need help with the plots for part a and c. My teacher ...
All I need help with is the matlab codes for B) and C) Photos of answers are below. Rate will be ...
 All I need help with is the matlab codes for B) and C)
Photos of answers are below.
Rate will be given for correct matlab code!
DP6.3 A unity negative feedback system with K(s + 2) has two parameters to be selected. (a) Determine and plot the regions of stability for this system. (b) Select r and K so that the steady-state error to a ramp input is less than or equal to 25% of the input magnitude. (c) Determine...
All I need help with is the matlab codes for B) and C)
Photos of answers are below.
Rate will be given for correct matlab code!
DP6.3 A unity negative feedback system with K(s + 2) has two parameters to be selected. (a) Determine and plot the regions of stability for this system. (b) Select r and K so that the steady-state error to a ramp input is less than or equal to 25% of the input magnitude. (c) Determine...
PROBLEM: A unity feedback system with the forward transfer function K G(s) s(s+7) is operating with...
 PROBLEM: A unity feedback system with the forward transfer function K G(s) s(s+7) is operating with a closed-loop step response that has 15% overshoot. Do the following: a. Evaluate the steady-state error for a unit ramp input. b. Design a lag compensator to improve the steady-state error by a factor of 20. c. Evaluate the steady-state error for a unit ramp input to your compensated system. d. Evaluate how much improvement in steady-state error was realized.
PROBLEM: A unity feedback system with the forward transfer function K G(s) s(s+7) is operating with a closed-loop step response that has 15% overshoot. Do the following: a. Evaluate the steady-state error for a unit ramp input. b. Design a lag compensator to improve the steady-state error by a factor of 20. c. Evaluate the steady-state error for a unit ramp input to your compensated system. d. Evaluate how much improvement in steady-state error was realized.
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s...
 Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
A unity feedback system with the forward transfer function G(s)=K/(s+1)(s+3)(s+6) is operating wi...
 A unity feedback system with the forward transfer function
G(s)=K/(s+1)(s+3)(s+6) is operating with a closed-loop step
response that has 15% overshoot. Do the following:
a) Evaluate the steady-state error for a unit step input
b) Design a PI control to reduce the steady-state error to zero
without affecting its transient response
c) Evaluate the steady-state error and overshoot for a unit step
input to your compensated system
A unity feedback system with the forward transfer function G(s) is operating with...
A unity feedback system with the forward transfer function
G(s)=K/(s+1)(s+3)(s+6) is operating with a closed-loop step
response that has 15% overshoot. Do the following:
a) Evaluate the steady-state error for a unit step input
b) Design a PI control to reduce the steady-state error to zero
without affecting its transient response
c) Evaluate the steady-state error and overshoot for a unit step
input to your compensated system
A unity feedback system with the forward transfer function G(s) is operating with...
Please show calculations by HAND and NOT MATLAB. The answers are here to help. Thank you Note : Ts= 4/&*wn (&=damping ratio) Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system wit...
 Please show calculations by HAND and NOT MATLAB. The answers are
here to help. Thank you
Note : Ts= 4/&*wn (&=damping ratio)
Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system with forward transfer function 6) s(s + is operating with a closed-loop step response that has 20% overshoot. Do the following: a. Evaluate the settling time. b. Evaluate the steady-state error for a unit ramp input. c. Design a lag-lead compensator to decrease the settling time by 2 times and...
Please show calculations by HAND and NOT MATLAB. The answers are
here to help. Thank you
Note : Ts= 4/&*wn (&=damping ratio)
Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system with forward transfer function 6) s(s + is operating with a closed-loop step response that has 20% overshoot. Do the following: a. Evaluate the settling time. b. Evaluate the steady-state error for a unit ramp input. c. Design a lag-lead compensator to decrease the settling time by 2 times and...
R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem...
 R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
E4.5 A unity feedback system has the loop transfer function 100K L(s) Ge(s)G(s) 1 s(s b)...
 E4.5 A unity feedback system has the loop transfer function 100K L(s) Ge(s)G(s) 1 s(s b) Determine the relationship between the steady-state error to a ramp input and the gain K and system pa- rameter b. For what values of K and b can we guaran- tee that the magnitude of the steady-state error to a ramp input is less than 0.1?
E4.5 A unity feedback system has the loop transfer function 100K L(s) Ge(s)G(s) 1 s(s b) Determine the...
E4.5 A unity feedback system has the loop transfer function 100K L(s) Ge(s)G(s) 1 s(s b) Determine the relationship between the steady-state error to a ramp input and the gain K and system pa- rameter b. For what values of K and b can we guaran- tee that the magnitude of the steady-state error to a ramp input is less than 0.1?
E4.5 A unity feedback system has the loop transfer function 100K L(s) Ge(s)G(s) 1 s(s b) Determine the...
 All I need help with is the matlab codes for B) and C)
Photos of answers are below.
Rate will be given for correct matlab code!
DP6.3 A unity negative feedback system with K(s + 2) has two parameters to be selected. (a) Determine and plot the regions of stability for this system. (b) Select r and K so that the steady-state error to a ramp input is less than or equal to 25% of the input magnitude. (c) Determine...
All I need help with is the matlab codes for B) and C)
Photos of answers are below.
Rate will be given for correct matlab code!
DP6.3 A unity negative feedback system with K(s + 2) has two parameters to be selected. (a) Determine and plot the regions of stability for this system. (b) Select r and K so that the steady-state error to a ramp input is less than or equal to 25% of the input magnitude. (c) Determine...
 PROBLEM: A unity feedback system with the forward transfer function K G(s) s(s+7) is operating with a closed-loop step response that has 15% overshoot. Do the following: a. Evaluate the steady-state error for a unit ramp input. b. Design a lag compensator to improve the steady-state error by a factor of 20. c. Evaluate the steady-state error for a unit ramp input to your compensated system. d. Evaluate how much improvement in steady-state error was realized.
PROBLEM: A unity feedback system with the forward transfer function K G(s) s(s+7) is operating with a closed-loop step response that has 15% overshoot. Do the following: a. Evaluate the steady-state error for a unit ramp input. b. Design a lag compensator to improve the steady-state error by a factor of 20. c. Evaluate the steady-state error for a unit ramp input to your compensated system. d. Evaluate how much improvement in steady-state error was realized.
 Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
 A unity feedback system with the forward transfer function
G(s)=K/(s+1)(s+3)(s+6) is operating with a closed-loop step
response that has 15% overshoot. Do the following:
a) Evaluate the steady-state error for a unit step input
b) Design a PI control to reduce the steady-state error to zero
without affecting its transient response
c) Evaluate the steady-state error and overshoot for a unit step
input to your compensated system
A unity feedback system with the forward transfer function G(s) is operating with...
A unity feedback system with the forward transfer function
G(s)=K/(s+1)(s+3)(s+6) is operating with a closed-loop step
response that has 15% overshoot. Do the following:
a) Evaluate the steady-state error for a unit step input
b) Design a PI control to reduce the steady-state error to zero
without affecting its transient response
c) Evaluate the steady-state error and overshoot for a unit step
input to your compensated system
A unity feedback system with the forward transfer function G(s) is operating with...
 Please show calculations by HAND and NOT MATLAB. The answers are
here to help. Thank you
Note : Ts= 4/&*wn (&=damping ratio)
Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system with forward transfer function 6) s(s + is operating with a closed-loop step response that has 20% overshoot. Do the following: a. Evaluate the settling time. b. Evaluate the steady-state error for a unit ramp input. c. Design a lag-lead compensator to decrease the settling time by 2 times and...
Please show calculations by HAND and NOT MATLAB. The answers are
here to help. Thank you
Note : Ts= 4/&*wn (&=damping ratio)
Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system with forward transfer function 6) s(s + is operating with a closed-loop step response that has 20% overshoot. Do the following: a. Evaluate the settling time. b. Evaluate the steady-state error for a unit ramp input. c. Design a lag-lead compensator to decrease the settling time by 2 times and...
 R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 E4.5 A unity feedback system has the loop transfer function 100K L(s) Ge(s)G(s) 1 s(s b) Determine the relationship between the steady-state error to a ramp input and the gain K and system pa- rameter b. For what values of K and b can we guaran- tee that the magnitude of the steady-state error to a ramp input is less than 0.1?
E4.5 A unity feedback system has the loop transfer function 100K L(s) Ge(s)G(s) 1 s(s b) Determine the...
E4.5 A unity feedback system has the loop transfer function 100K L(s) Ge(s)G(s) 1 s(s b) Determine the relationship between the steady-state error to a ramp input and the gain K and system pa- rameter b. For what values of K and b can we guaran- tee that the magnitude of the steady-state error to a ramp input is less than 0.1?
E4.5 A unity feedback system has the loop transfer function 100K L(s) Ge(s)G(s) 1 s(s b) Determine the...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago