 For b.), it is from 20 to -20.
Not 10 to -10
For b.), it is from 20 to -20.
Not 10 to -10
Homework Answers


Add Answer to:
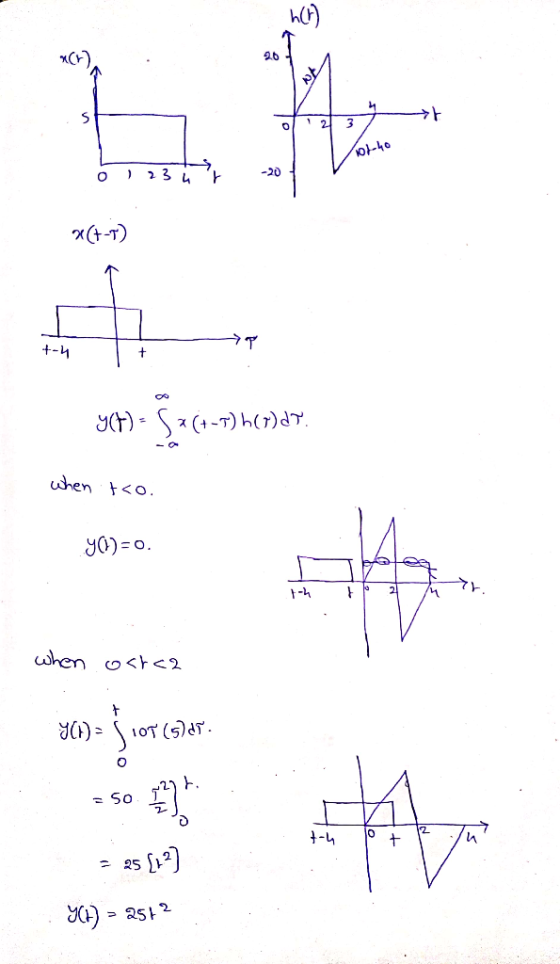
For b.), it is from 20 to -20. Not 10 to -10 3. (40 points) Consider the time signals shown in Figure3 h(t) 10 z(t) 2 -10 Figure 3 Find y(t)-h(t)sz(t) using the graphical approach of the convolution i...
Solve using convolution integral The signals h(t) and f(t) are as shown in Figure 12(a) and...
 Solve using convolution integral
The signals h(t) and f(t) are as shown in Figure 12(a) and (b), respectively. Compute and sketch the graph of h(t) f(t). 1 h(t)--t+1 f(t)-u(t)-u(t-1) Figure 12(a) Figure 12(b)
Solve using convolution integral
The signals h(t) and f(t) are as shown in Figure 12(a) and (b), respectively. Compute and sketch the graph of h(t) f(t). 1 h(t)--t+1 f(t)-u(t)-u(t-1) Figure 12(a) Figure 12(b)
Please show using MATLAB Answer 7. Obtain the convolution of the pairs of signals in Figure 7 h(t) a(t) 0 2 h(t) r(t) 0 0 Figure 7: Signal pairs Therefore, y(t) = 0 otherwise 7. Obtain the convol...
 Please show using MATLAB Answer
7. Obtain the convolution of the pairs of signals in Figure 7 h(t) a(t) 0 2 h(t) r(t) 0 0 Figure 7: Signal pairs Therefore, y(t) = 0 otherwise
7. Obtain the convolution of the pairs of signals in Figure 7 h(t) a(t) 0 2 h(t) r(t) 0 0 Figure 7: Signal pairs
Therefore, y(t) = 0 otherwise
Please show using MATLAB Answer
7. Obtain the convolution of the pairs of signals in Figure 7 h(t) a(t) 0 2 h(t) r(t) 0 0 Figure 7: Signal pairs Therefore, y(t) = 0 otherwise
7. Obtain the convolution of the pairs of signals in Figure 7 h(t) a(t) 0 2 h(t) r(t) 0 0 Figure 7: Signal pairs
Therefore, y(t) = 0 otherwise
2. (30 marks] Consider the system shown in Fig. 1. Find the output y(t) for the...
 2. (30 marks] Consider the system shown in Fig. 1. Find the output y(t) for the following h(t) and r(t) using the convolution integral. x(r) y(r) h(t) Figure 1: System for Q2 1.5 2t33 0 otherwise h(t)=2rect(-3.5) x(t) = h(t) = 2 rect (-3 -
2. (30 marks] Consider the system shown in Fig. 1. Find the output y(t) for the following h(t) and r(t) using the convolution integral. x(r) y(r) h(t) Figure 1: System for Q2 1.5 2t33 0 otherwise h(t)=2rect(-3.5) x(t) = h(t) = 2 rect (-3 -
Problem 4: [10 Points A LTIC systems has impulse response as showm betlow t h(t) Using analytical or graphical convolution, find and sketch the system's output yto if the input x (t) is: x(t)...
 Problem 4: [10 Points A LTIC systems has impulse response as showm betlow t h(t) Using analytical or graphical convolution, find and sketch the system's output yto if the input x (t) is: x(t):#6(t) _ 26(t-1)[31 a) b) x(o) - rect ()17 Solution:
Problem 4: [10 Points A LTIC systems has impulse response as showm betlow t h(t) Using analytical or graphical convolution, find and sketch the system's output yto if the input x (t) is: x(t):#6(t) _ 26(t-1)[31 a)...
Problem 4: [10 Points A LTIC systems has impulse response as showm betlow t h(t) Using analytical or graphical convolution, find and sketch the system's output yto if the input x (t) is: x(t):#6(t) _ 26(t-1)[31 a) b) x(o) - rect ()17 Solution:
Problem 4: [10 Points A LTIC systems has impulse response as showm betlow t h(t) Using analytical or graphical convolution, find and sketch the system's output yto if the input x (t) is: x(t):#6(t) _ 26(t-1)[31 a)...
Q2 (a) Given the signal x(t) and system h(t) as presented in Figure Q2(a). Determine the...
 Q2 (a) Given the signal x(t) and system h(t) as presented in Figure Q2(a). Determine the output y(t) using the graphical representation of convolution integral. (7 marks) x(1) h(t) 1 e-'u(t) e-2 (1) 0 Figure Q2(a) Q2 (b) Consider a system as shown in Figure Q2(b). t2 - 1 x(t) y(t) Advance by 1 second Х Figure Q2(b) Find the input-output relation between x(t) and y(t). (i) (1 mark) Examine whether the system is time variant or time invariant. (5...
Q2 (a) Given the signal x(t) and system h(t) as presented in Figure Q2(a). Determine the output y(t) using the graphical representation of convolution integral. (7 marks) x(1) h(t) 1 e-'u(t) e-2 (1) 0 Figure Q2(a) Q2 (b) Consider a system as shown in Figure Q2(b). t2 - 1 x(t) y(t) Advance by 1 second Х Figure Q2(b) Find the input-output relation between x(t) and y(t). (i) (1 mark) Examine whether the system is time variant or time invariant. (5...
Name: UIN: Course No 4. (20 points, 5 points each) Two finite length signals, nijej and rlel are given Let y(n] be the linear convolution of a ej and lal (a) Detemine yin) (b) Ifwe execute the fol...
 Name: UIN: Course No 4. (20 points, 5 points each) Two finite length signals, nijej and rlel are given Let y(n] be the linear convolution of a ej and lal (a) Detemine yin) (b) Ifwe execute the following Matlab script to get yiin what is ynn List all values in y(n) p-ifftfh,8).h,8)),8)% (hint: 8-point circular convolution) (c) Ifwe execute the following Matlab script to get yinl what is ylm? List all values in yin n- ifhiiff,10)ffhc,10)),10)(hint: 10-point circular convolution) Write...
Name: UIN: Course No 4. (20 points, 5 points each) Two finite length signals, nijej and rlel are given Let y(n] be the linear convolution of a ej and lal (a) Detemine yin) (b) Ifwe execute the following Matlab script to get yiin what is ynn List all values in y(n) p-ifftfh,8).h,8)),8)% (hint: 8-point circular convolution) (c) Ifwe execute the following Matlab script to get yinl what is ylm? List all values in yin n- ifhiiff,10)ffhc,10)),10)(hint: 10-point circular convolution) Write...
Problem 4: Evaluation of the convolution integral too y(t) = (f * h)(t) = f(t)h(t –...
 Problem 4: Evaluation of the convolution integral too y(t) = (f * h)(t) = f(t)h(t – 7)dt is greatly simplified when either the input f(t) or impulse response h(t) is the sum of weighted impulse functions. This fact will be used later in the semester when we study the operation of communication systems using Fourier analysis methods. a) Use the convolution integral to prove that f(t) *8(t – T) = f(t – T) and 8(t – T) *h(t) = h(t...
Problem 4: Evaluation of the convolution integral too y(t) = (f * h)(t) = f(t)h(t – 7)dt is greatly simplified when either the input f(t) or impulse response h(t) is the sum of weighted impulse functions. This fact will be used later in the semester when we study the operation of communication systems using Fourier analysis methods. a) Use the convolution integral to prove that f(t) *8(t – T) = f(t – T) and 8(t – T) *h(t) = h(t...
1. Consider the system shown in the figure below. The system is an integrator, in which...
 1. Consider the system shown in the figure below. The system is an integrator, in which the output is the integral: y(t)x()dr -00 Integrator x(t) y(t) (a) We may determine the impulse response h(t) by applying an impulse signal to the integrator, i.e. x(t) -5(t). What is the impulse response? Answer: (10 points) (b) The output of the integrator may be found by apply convolution method to determine the output. The convolution of the two signals is expressed a)ht -...
1. Consider the system shown in the figure below. The system is an integrator, in which the output is the integral: y(t)x()dr -00 Integrator x(t) y(t) (a) We may determine the impulse response h(t) by applying an impulse signal to the integrator, i.e. x(t) -5(t). What is the impulse response? Answer: (10 points) (b) The output of the integrator may be found by apply convolution method to determine the output. The convolution of the two signals is expressed a)ht -...
9. MATLAB Problem: Use Matlab to find the convolution y(t) of f(t)2tu(t) and h(t) ut1u(t-1). You ...
 9. MATLAB Problem: Use Matlab to find the convolution y(t) of f(t)2tu(t) and h(t) ut1u(t-1). You should submit a printout of the matlab code as an m-file with comments (using %) explaining the role of each line. You should also submit a plot ofy(t) for-l sts 4. You may find Computer Example C2.4 on page 137 useful EXAMPLE FROM BOOK IS BELOW. System Response to External Input: The Zero-Sta 2.4 QComputer Example C2.4 Find c(t) = f(t) * g(t) for...
9. MATLAB Problem: Use Matlab to find the convolution y(t) of f(t)2tu(t) and h(t) ut1u(t-1). You should submit a printout of the matlab code as an m-file with comments (using %) explaining the role of each line. You should also submit a plot ofy(t) for-l sts 4. You may find Computer Example C2.4 on page 137 useful EXAMPLE FROM BOOK IS BELOW. System Response to External Input: The Zero-Sta 2.4 QComputer Example C2.4 Find c(t) = f(t) * g(t) for...
solve 2.40 a,b,c, e using Fourier series. 2.40 part a,b,c,e 2.40 Consider the continuous-time signals depicted in Fig. P2.40. Evaluate the following convolution integrals: (a) m(t) x(t) y(t) (...
 solve 2.40 a,b,c, e using Fourier series.
2.40 part a,b,c,e 2.40 Consider the continuous-time signals depicted in Fig. P2.40. Evaluate the following convolution integrals: (a) m(t) x(t) y(t) (b) m(t)x(t)z(t) (c) m(t) x(t) ft) (d) m(t) x(t) a(t) (e) m(t)y(t) z(t) (f) m(t) -y(t) w(t) (g) m(t) y(t)g(t) (h) m(t)y(t) c(t) (i) m(t) z(t) f(t) (j) m(t) z(t) g(t) (k) m(t) z(t)b(t) (1) m(t) w(t) g(t) (m) m(t) w(t) a(t) (n) m(t) f(t) g(t (o) m(t) fo) . do) (p)...
solve 2.40 a,b,c, e using Fourier series.
2.40 part a,b,c,e 2.40 Consider the continuous-time signals depicted in Fig. P2.40. Evaluate the following convolution integrals: (a) m(t) x(t) y(t) (b) m(t)x(t)z(t) (c) m(t) x(t) ft) (d) m(t) x(t) a(t) (e) m(t)y(t) z(t) (f) m(t) -y(t) w(t) (g) m(t) y(t)g(t) (h) m(t)y(t) c(t) (i) m(t) z(t) f(t) (j) m(t) z(t) g(t) (k) m(t) z(t)b(t) (1) m(t) w(t) g(t) (m) m(t) w(t) a(t) (n) m(t) f(t) g(t (o) m(t) fo) . do) (p)...
 Solve using convolution integral
The signals h(t) and f(t) are as shown in Figure 12(a) and (b), respectively. Compute and sketch the graph of h(t) f(t). 1 h(t)--t+1 f(t)-u(t)-u(t-1) Figure 12(a) Figure 12(b)
Solve using convolution integral
The signals h(t) and f(t) are as shown in Figure 12(a) and (b), respectively. Compute and sketch the graph of h(t) f(t). 1 h(t)--t+1 f(t)-u(t)-u(t-1) Figure 12(a) Figure 12(b)
 Please show using MATLAB Answer
7. Obtain the convolution of the pairs of signals in Figure 7 h(t) a(t) 0 2 h(t) r(t) 0 0 Figure 7: Signal pairs Therefore, y(t) = 0 otherwise
7. Obtain the convolution of the pairs of signals in Figure 7 h(t) a(t) 0 2 h(t) r(t) 0 0 Figure 7: Signal pairs
Therefore, y(t) = 0 otherwise
Please show using MATLAB Answer
7. Obtain the convolution of the pairs of signals in Figure 7 h(t) a(t) 0 2 h(t) r(t) 0 0 Figure 7: Signal pairs Therefore, y(t) = 0 otherwise
7. Obtain the convolution of the pairs of signals in Figure 7 h(t) a(t) 0 2 h(t) r(t) 0 0 Figure 7: Signal pairs
Therefore, y(t) = 0 otherwise
 2. (30 marks] Consider the system shown in Fig. 1. Find the output y(t) for the following h(t) and r(t) using the convolution integral. x(r) y(r) h(t) Figure 1: System for Q2 1.5 2t33 0 otherwise h(t)=2rect(-3.5) x(t) = h(t) = 2 rect (-3 -
2. (30 marks] Consider the system shown in Fig. 1. Find the output y(t) for the following h(t) and r(t) using the convolution integral. x(r) y(r) h(t) Figure 1: System for Q2 1.5 2t33 0 otherwise h(t)=2rect(-3.5) x(t) = h(t) = 2 rect (-3 -
 Problem 4: [10 Points A LTIC systems has impulse response as showm betlow t h(t) Using analytical or graphical convolution, find and sketch the system's output yto if the input x (t) is: x(t):#6(t) _ 26(t-1)[31 a) b) x(o) - rect ()17 Solution:
Problem 4: [10 Points A LTIC systems has impulse response as showm betlow t h(t) Using analytical or graphical convolution, find and sketch the system's output yto if the input x (t) is: x(t):#6(t) _ 26(t-1)[31 a)...
Problem 4: [10 Points A LTIC systems has impulse response as showm betlow t h(t) Using analytical or graphical convolution, find and sketch the system's output yto if the input x (t) is: x(t):#6(t) _ 26(t-1)[31 a) b) x(o) - rect ()17 Solution:
Problem 4: [10 Points A LTIC systems has impulse response as showm betlow t h(t) Using analytical or graphical convolution, find and sketch the system's output yto if the input x (t) is: x(t):#6(t) _ 26(t-1)[31 a)...
 Q2 (a) Given the signal x(t) and system h(t) as presented in Figure Q2(a). Determine the output y(t) using the graphical representation of convolution integral. (7 marks) x(1) h(t) 1 e-'u(t) e-2 (1) 0 Figure Q2(a) Q2 (b) Consider a system as shown in Figure Q2(b). t2 - 1 x(t) y(t) Advance by 1 second Х Figure Q2(b) Find the input-output relation between x(t) and y(t). (i) (1 mark) Examine whether the system is time variant or time invariant. (5...
Q2 (a) Given the signal x(t) and system h(t) as presented in Figure Q2(a). Determine the output y(t) using the graphical representation of convolution integral. (7 marks) x(1) h(t) 1 e-'u(t) e-2 (1) 0 Figure Q2(a) Q2 (b) Consider a system as shown in Figure Q2(b). t2 - 1 x(t) y(t) Advance by 1 second Х Figure Q2(b) Find the input-output relation between x(t) and y(t). (i) (1 mark) Examine whether the system is time variant or time invariant. (5...
 Name: UIN: Course No 4. (20 points, 5 points each) Two finite length signals, nijej and rlel are given Let y(n] be the linear convolution of a ej and lal (a) Detemine yin) (b) Ifwe execute the following Matlab script to get yiin what is ynn List all values in y(n) p-ifftfh,8).h,8)),8)% (hint: 8-point circular convolution) (c) Ifwe execute the following Matlab script to get yinl what is ylm? List all values in yin n- ifhiiff,10)ffhc,10)),10)(hint: 10-point circular convolution) Write...
Name: UIN: Course No 4. (20 points, 5 points each) Two finite length signals, nijej and rlel are given Let y(n] be the linear convolution of a ej and lal (a) Detemine yin) (b) Ifwe execute the following Matlab script to get yiin what is ynn List all values in y(n) p-ifftfh,8).h,8)),8)% (hint: 8-point circular convolution) (c) Ifwe execute the following Matlab script to get yinl what is ylm? List all values in yin n- ifhiiff,10)ffhc,10)),10)(hint: 10-point circular convolution) Write...
 Problem 4: Evaluation of the convolution integral too y(t) = (f * h)(t) = f(t)h(t – 7)dt is greatly simplified when either the input f(t) or impulse response h(t) is the sum of weighted impulse functions. This fact will be used later in the semester when we study the operation of communication systems using Fourier analysis methods. a) Use the convolution integral to prove that f(t) *8(t – T) = f(t – T) and 8(t – T) *h(t) = h(t...
Problem 4: Evaluation of the convolution integral too y(t) = (f * h)(t) = f(t)h(t – 7)dt is greatly simplified when either the input f(t) or impulse response h(t) is the sum of weighted impulse functions. This fact will be used later in the semester when we study the operation of communication systems using Fourier analysis methods. a) Use the convolution integral to prove that f(t) *8(t – T) = f(t – T) and 8(t – T) *h(t) = h(t...
 1. Consider the system shown in the figure below. The system is an integrator, in which the output is the integral: y(t)x()dr -00 Integrator x(t) y(t) (a) We may determine the impulse response h(t) by applying an impulse signal to the integrator, i.e. x(t) -5(t). What is the impulse response? Answer: (10 points) (b) The output of the integrator may be found by apply convolution method to determine the output. The convolution of the two signals is expressed a)ht -...
1. Consider the system shown in the figure below. The system is an integrator, in which the output is the integral: y(t)x()dr -00 Integrator x(t) y(t) (a) We may determine the impulse response h(t) by applying an impulse signal to the integrator, i.e. x(t) -5(t). What is the impulse response? Answer: (10 points) (b) The output of the integrator may be found by apply convolution method to determine the output. The convolution of the two signals is expressed a)ht -...
 9. MATLAB Problem: Use Matlab to find the convolution y(t) of f(t)2tu(t) and h(t) ut1u(t-1). You should submit a printout of the matlab code as an m-file with comments (using %) explaining the role of each line. You should also submit a plot ofy(t) for-l sts 4. You may find Computer Example C2.4 on page 137 useful EXAMPLE FROM BOOK IS BELOW. System Response to External Input: The Zero-Sta 2.4 QComputer Example C2.4 Find c(t) = f(t) * g(t) for...
9. MATLAB Problem: Use Matlab to find the convolution y(t) of f(t)2tu(t) and h(t) ut1u(t-1). You should submit a printout of the matlab code as an m-file with comments (using %) explaining the role of each line. You should also submit a plot ofy(t) for-l sts 4. You may find Computer Example C2.4 on page 137 useful EXAMPLE FROM BOOK IS BELOW. System Response to External Input: The Zero-Sta 2.4 QComputer Example C2.4 Find c(t) = f(t) * g(t) for...
 solve 2.40 a,b,c, e using Fourier series.
2.40 part a,b,c,e 2.40 Consider the continuous-time signals depicted in Fig. P2.40. Evaluate the following convolution integrals: (a) m(t) x(t) y(t) (b) m(t)x(t)z(t) (c) m(t) x(t) ft) (d) m(t) x(t) a(t) (e) m(t)y(t) z(t) (f) m(t) -y(t) w(t) (g) m(t) y(t)g(t) (h) m(t)y(t) c(t) (i) m(t) z(t) f(t) (j) m(t) z(t) g(t) (k) m(t) z(t)b(t) (1) m(t) w(t) g(t) (m) m(t) w(t) a(t) (n) m(t) f(t) g(t (o) m(t) fo) . do) (p)...
solve 2.40 a,b,c, e using Fourier series.
2.40 part a,b,c,e 2.40 Consider the continuous-time signals depicted in Fig. P2.40. Evaluate the following convolution integrals: (a) m(t) x(t) y(t) (b) m(t)x(t)z(t) (c) m(t) x(t) ft) (d) m(t) x(t) a(t) (e) m(t)y(t) z(t) (f) m(t) -y(t) w(t) (g) m(t) y(t)g(t) (h) m(t)y(t) c(t) (i) m(t) z(t) f(t) (j) m(t) z(t) g(t) (k) m(t) z(t)b(t) (1) m(t) w(t) g(t) (m) m(t) w(t) a(t) (n) m(t) f(t) g(t (o) m(t) fo) . do) (p)...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 11 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 11 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 11 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 11 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 11 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 11 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 11 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 11 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 11 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 11 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 11 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 11 months ago