
Homework Answers
Add Answer to:
(2) (a) Prove that there is a C1 map u : E → R-defined in a neighborhood E c R2 of the point (1,0) such that (b) Find u'(x) for x E E (c) Prove that there is a Cl map : G → R2 defined in a neighb...
(2) (a) Prove that there is a C1 map u: E → R2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for x є E. (c) Prove that there is a C map v G R2 defined in a neighborhood...
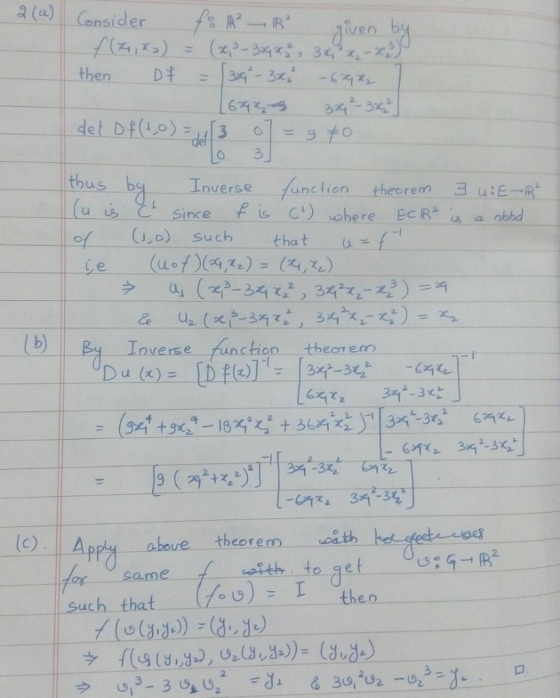
 (2) (a) Prove that there is a C1 map u: E → R2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for x є E. (c) Prove that there is a C map v G R2 defined in a neighborhood G C R2 of the point (1,0) such that for all y G.
(2) (a) Prove that there is a C1 map u: E → R2 defined in a neighborhood E C...
(2) (a) Prove that there is a C1 map u: E → R2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for x є E. (c) Prove that there is a C map v G R2 defined in a neighborhood G C R2 of the point (1,0) such that for all y G.
(2) (a) Prove that there is a C1 map u: E → R2 defined in a neighborhood E C...
(2) (a) Prove that there is a C mapu ER2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for r E E (c) Prove that there is a C map v:GR2 defined in a neighborhood GCR2 of...
 (2) (a) Prove that there is a C mapu ER2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for r E E (c) Prove that there is a C map v:GR2 defined in a neighborhood GCR2 of the point (1,0) such that e) for all y G
(2) (a) Prove that there is a C mapu ER2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find...
(2) (a) Prove that there is a C mapu ER2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for r E E (c) Prove that there is a C map v:GR2 defined in a neighborhood GCR2 of the point (1,0) such that e) for all y G
(2) (a) Prove that there is a C mapu ER2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find...
2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. A...
 2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. Assume that there exists r >0 such that B(zo, r) C U and g=0. Let γ be a closed sinile polygonal arc with range in U \ {zo), let「be its range, and let V be the bounded connected component of R2 \ Г. (a) Assume that V C U \ [xo) and prove that g=0. (b) Assume that...
2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. Assume that there exists r >0 such that B(zo, r) C U and g=0. Let γ be a closed sinile polygonal arc with range in U \ {zo), let「be its range, and let V be the bounded connected component of R2 \ Г. (a) Assume that V C U \ [xo) and prove that g=0. (b) Assume that...
(9) Let E R" and let A E L(R"). Define a map f : R" -> R" by f (x) A,)v. Here (is the Euclidean inne...
 (9) Let E R" and let A E L(R"). Define a map f : R" -> R" by f (x) A,)v. Here (is the Euclidean inner product (a) Prove that f is a C1 map and find f'(x) (b) Prove that there exist two that f U V is a bijection on R" neighborhoods of the origin in R", U and V, such
(9) Let E R" and let A E L(R"). Define a map f : R" -> R"...
(9) Let E R" and let A E L(R"). Define a map f : R" -> R" by f (x) A,)v. Here (is the Euclidean inner product (a) Prove that f is a C1 map and find f'(x) (b) Prove that there exist two that f U V is a bijection on R" neighborhoods of the origin in R", U and V, such
(9) Let E R" and let A E L(R"). Define a map f : R" -> R"...
Question #4 Consider the linear map, Prove that L^n x goes to 0 for all x in R^2. prove that if x...
 Question #4
Consider the linear map, Prove that L^n x goes to 0 for all x
in R^2. prove that if x does not lie on the y axis then the orbit
of x tends to 0 tangentially to the x -axis.
4. Consider the linear map 0 L(x) = X. Prove that L"X → 0 for all x E R2. Prove that, if x does not lie on the y-axis, then the orbit of x tends to 0 tangentially...
Question #4
Consider the linear map, Prove that L^n x goes to 0 for all x
in R^2. prove that if x does not lie on the y axis then the orbit
of x tends to 0 tangentially to the x -axis.
4. Consider the linear map 0 L(x) = X. Prove that L"X → 0 for all x E R2. Prove that, if x does not lie on the y-axis, then the orbit of x tends to 0 tangentially...
16, Let x: U R2-, R, where x(8, φ) (sin θ cos φ, sin θ sin φ, cos θ), be a parametrization of the...
 16, Let x: U R2-, R, where x(8, φ) (sin θ cos φ, sin θ sin φ, cos θ), be a parametrization of the unit sphere S2. Let and show that a new parametrization of the coordinate neighborhood x(U) = V can be given by y(u, (sech u cos e, sech u sin e, tanh u Prove that in the parametrization y the coefficients of the first fundamental form are Thus, y-1: V : S2 → R2 is a conformal...
16, Let x: U R2-, R, where x(8, φ) (sin θ cos φ, sin θ sin φ, cos θ), be a parametrization of the unit sphere S2. Let and show that a new parametrization of the coordinate neighborhood x(U) = V can be given by y(u, (sech u cos e, sech u sin e, tanh u Prove that in the parametrization y the coefficients of the first fundamental form are Thus, y-1: V : S2 → R2 is a conformal...
Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 ...
 Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 | g(z, y) = 0} S Suppose g(a, b)-0 so that (a, b) E S and dg(a, b)メO. Then there exists an open neighborhood of (a, b) say V such that SnV is the image of a smooth parameterized curve. (1) Verify the implicit function theorem using the two examples above. 2) Since dg(a,b) 0, argue that it suffices to...
Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 | g(z, y) = 0} S Suppose g(a, b)-0 so that (a, b) E S and dg(a, b)メO. Then there exists an open neighborhood of (a, b) say V such that SnV is the image of a smooth parameterized curve. (1) Verify the implicit function theorem using the two examples above. 2) Since dg(a,b) 0, argue that it suffices to...
2. Assume the group G acts on the set S. For E S, define Then G is a subgroup of G , which is called the stabilizer of r. The set is called the orbit of r (a) Consider the map ф' G S, defined...
 2. Assume the group G acts on the set S. For E S, define Then G is a subgroup of G , which is called the stabilizer of r. The set is called the orbit of r (a) Consider the map ф' G S, defined by фг (g) :-9-x. Prove that there is one map (and only one) : G/G, S such that Vz ยู่'z q (where q: G -G/G, is the quotient map). (b) Prove that is injective. (Hint:...
2. Assume the group G acts on the set S. For E S, define Then G is a subgroup of G , which is called the stabilizer of r. The set is called the orbit of r (a) Consider the map ф' G S, defined by фг (g) :-9-x. Prove that there is one map (and only one) : G/G, S such that Vz ยู่'z q (where q: G -G/G, is the quotient map). (b) Prove that is injective. (Hint:...
5. Assume x, y E R2 with ll2l1. Find a Givens rotation matrix G- CS(i.e., find c s cl (ie, find c...
 5. Assume x, y E R2 with ll2l1. Find a Givens rotation matrix G- CS(i.e., find c s cl (ie, find c and 8 with c2 + 82-1) such that y = Ga.
5. Assume x, y E R2 with ll2l1. Find a Givens rotation matrix G- CS(i.e., find c s cl (ie, find c and 8 with c2 + 82-1) such that y = Ga.
5. Assume x, y E R2 with ll2l1. Find a Givens rotation matrix G- CS(i.e., find c s cl (ie, find c and 8 with c2 + 82-1) such that y = Ga.
5. Assume x, y E R2 with ll2l1. Find a Givens rotation matrix G- CS(i.e., find c s cl (ie, find c and 8 with c2 + 82-1) such that y = Ga.
Let V = P1(R) and W = R2. Let B = (1,x) and y=((1,0), (0, 1))...
 Let V = P1(R) and W = R2. Let B = (1,x) and y=((1,0), (0, 1)) be the standard ordered bases for V and W respectively. Define a linear map T:V + W by T(P(x)) = (p(0) – 2p(1), p(0) + p'(0)). (a) Let FEW* be defined by f(a,b) = a – 26. Compute T*(f). (b) Compute [T]y,ß and (T*]*,y* using the definition of the matrix of a linear transformation.
Let V = P1(R) and W = R2. Let B = (1,x) and y=((1,0), (0, 1)) be the standard ordered bases for V and W respectively. Define a linear map T:V + W by T(P(x)) = (p(0) – 2p(1), p(0) + p'(0)). (a) Let FEW* be defined by f(a,b) = a – 26. Compute T*(f). (b) Compute [T]y,ß and (T*]*,y* using the definition of the matrix of a linear transformation.
 (2) (a) Prove that there is a C1 map u: E → R2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for x є E. (c) Prove that there is a C map v G R2 defined in a neighborhood G C R2 of the point (1,0) such that for all y G.
(2) (a) Prove that there is a C1 map u: E → R2 defined in a neighborhood E C...
(2) (a) Prove that there is a C1 map u: E → R2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for x є E. (c) Prove that there is a C map v G R2 defined in a neighborhood G C R2 of the point (1,0) such that for all y G.
(2) (a) Prove that there is a C1 map u: E → R2 defined in a neighborhood E C...
 (2) (a) Prove that there is a C mapu ER2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for r E E (c) Prove that there is a C map v:GR2 defined in a neighborhood GCR2 of the point (1,0) such that e) for all y G
(2) (a) Prove that there is a C mapu ER2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find...
(2) (a) Prove that there is a C mapu ER2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find Du(x) for r E E (c) Prove that there is a C map v:GR2 defined in a neighborhood GCR2 of the point (1,0) such that e) for all y G
(2) (a) Prove that there is a C mapu ER2 defined in a neighborhood E C R2 of the point (1,0) such that (b) Find...
 2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. Assume that there exists r >0 such that B(zo, r) C U and g=0. Let γ be a closed sinile polygonal arc with range in U \ {zo), let「be its range, and let V be the bounded connected component of R2 \ Г. (a) Assume that V C U \ [xo) and prove that g=0. (b) Assume that...
2. Let U C R2 be simply connected and let to E U. Let g: U(oR2 be irrotational and of class C1. Assume that there exists r >0 such that B(zo, r) C U and g=0. Let γ be a closed sinile polygonal arc with range in U \ {zo), let「be its range, and let V be the bounded connected component of R2 \ Г. (a) Assume that V C U \ [xo) and prove that g=0. (b) Assume that...
 (9) Let E R" and let A E L(R"). Define a map f : R" -> R" by f (x) A,)v. Here (is the Euclidean inner product (a) Prove that f is a C1 map and find f'(x) (b) Prove that there exist two that f U V is a bijection on R" neighborhoods of the origin in R", U and V, such
(9) Let E R" and let A E L(R"). Define a map f : R" -> R"...
(9) Let E R" and let A E L(R"). Define a map f : R" -> R" by f (x) A,)v. Here (is the Euclidean inner product (a) Prove that f is a C1 map and find f'(x) (b) Prove that there exist two that f U V is a bijection on R" neighborhoods of the origin in R", U and V, such
(9) Let E R" and let A E L(R"). Define a map f : R" -> R"...
 Question #4
Consider the linear map, Prove that L^n x goes to 0 for all x
in R^2. prove that if x does not lie on the y axis then the orbit
of x tends to 0 tangentially to the x -axis.
4. Consider the linear map 0 L(x) = X. Prove that L"X → 0 for all x E R2. Prove that, if x does not lie on the y-axis, then the orbit of x tends to 0 tangentially...
Question #4
Consider the linear map, Prove that L^n x goes to 0 for all x
in R^2. prove that if x does not lie on the y axis then the orbit
of x tends to 0 tangentially to the x -axis.
4. Consider the linear map 0 L(x) = X. Prove that L"X → 0 for all x E R2. Prove that, if x does not lie on the y-axis, then the orbit of x tends to 0 tangentially...
 16, Let x: U R2-, R, where x(8, φ) (sin θ cos φ, sin θ sin φ, cos θ), be a parametrization of the unit sphere S2. Let and show that a new parametrization of the coordinate neighborhood x(U) = V can be given by y(u, (sech u cos e, sech u sin e, tanh u Prove that in the parametrization y the coefficients of the first fundamental form are Thus, y-1: V : S2 → R2 is a conformal...
16, Let x: U R2-, R, where x(8, φ) (sin θ cos φ, sin θ sin φ, cos θ), be a parametrization of the unit sphere S2. Let and show that a new parametrization of the coordinate neighborhood x(U) = V can be given by y(u, (sech u cos e, sech u sin e, tanh u Prove that in the parametrization y the coefficients of the first fundamental form are Thus, y-1: V : S2 → R2 is a conformal...
 Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 | g(z, y) = 0} S Suppose g(a, b)-0 so that (a, b) E S and dg(a, b)メO. Then there exists an open neighborhood of (a, b) say V such that SnV is the image of a smooth parameterized curve. (1) Verify the implicit function theorem using the two examples above. 2) Since dg(a,b) 0, argue that it suffices to...
Implicit Function Theorem in Two Variables: Let g: R2 → R be a smooth function. Set {(z, y) E R2 | g(z, y) = 0} S Suppose g(a, b)-0 so that (a, b) E S and dg(a, b)メO. Then there exists an open neighborhood of (a, b) say V such that SnV is the image of a smooth parameterized curve. (1) Verify the implicit function theorem using the two examples above. 2) Since dg(a,b) 0, argue that it suffices to...
 2. Assume the group G acts on the set S. For E S, define Then G is a subgroup of G , which is called the stabilizer of r. The set is called the orbit of r (a) Consider the map ф' G S, defined by фг (g) :-9-x. Prove that there is one map (and only one) : G/G, S such that Vz ยู่'z q (where q: G -G/G, is the quotient map). (b) Prove that is injective. (Hint:...
2. Assume the group G acts on the set S. For E S, define Then G is a subgroup of G , which is called the stabilizer of r. The set is called the orbit of r (a) Consider the map ф' G S, defined by фг (g) :-9-x. Prove that there is one map (and only one) : G/G, S such that Vz ยู่'z q (where q: G -G/G, is the quotient map). (b) Prove that is injective. (Hint:...
 5. Assume x, y E R2 with ll2l1. Find a Givens rotation matrix G- CS(i.e., find c s cl (ie, find c and 8 with c2 + 82-1) such that y = Ga.
5. Assume x, y E R2 with ll2l1. Find a Givens rotation matrix G- CS(i.e., find c s cl (ie, find c and 8 with c2 + 82-1) such that y = Ga.
5. Assume x, y E R2 with ll2l1. Find a Givens rotation matrix G- CS(i.e., find c s cl (ie, find c and 8 with c2 + 82-1) such that y = Ga.
5. Assume x, y E R2 with ll2l1. Find a Givens rotation matrix G- CS(i.e., find c s cl (ie, find c and 8 with c2 + 82-1) such that y = Ga.
 Let V = P1(R) and W = R2. Let B = (1,x) and y=((1,0), (0, 1)) be the standard ordered bases for V and W respectively. Define a linear map T:V + W by T(P(x)) = (p(0) – 2p(1), p(0) + p'(0)). (a) Let FEW* be defined by f(a,b) = a – 26. Compute T*(f). (b) Compute [T]y,ß and (T*]*,y* using the definition of the matrix of a linear transformation.
Let V = P1(R) and W = R2. Let B = (1,x) and y=((1,0), (0, 1)) be the standard ordered bases for V and W respectively. Define a linear map T:V + W by T(P(x)) = (p(0) – 2p(1), p(0) + p'(0)). (a) Let FEW* be defined by f(a,b) = a – 26. Compute T*(f). (b) Compute [T]y,ß and (T*]*,y* using the definition of the matrix of a linear transformation.
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago