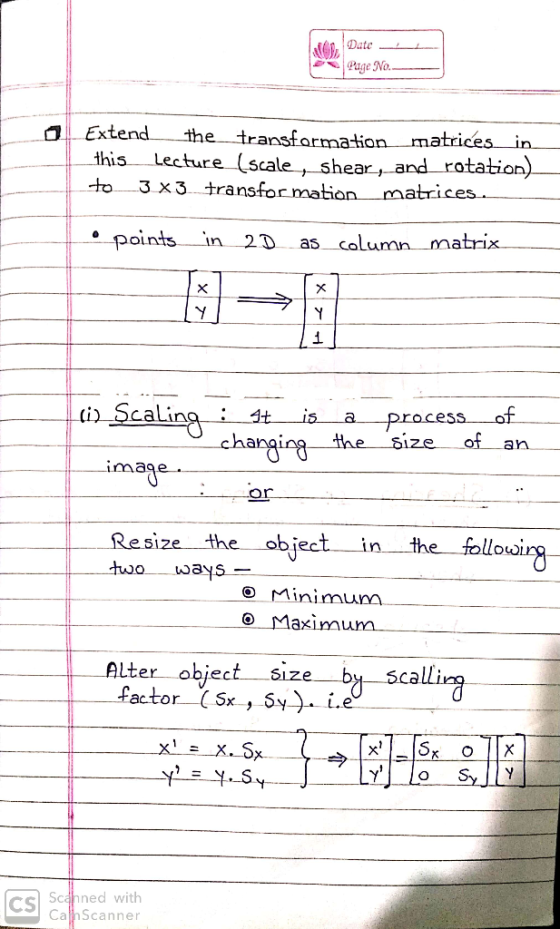
 8 Extend the transformation
matrices in this lecture (scale, shear, and rotation) to 3 × 3
transformation matrices.
8 Extend the transformation
matrices in this lecture (scale, shear, and rotation) to 3 × 3
transformation matrices.
Homework Answers





Add Answer to:
8 Extend the transformation matrices in this lecture (scale, shear, and rotation) to 3 × 3...
List the eigenvalues of A. The transformation x+Ax is the composition of a rotation and a...
 List the eigenvalues of A. The transformation x+Ax is the composition of a rotation and a scaling. Give the angle φ of the rotation, where-π<φ π, and give the scale factor. 8-8 A- The eigenvalues of A are λ D (Use a comma to separate answers as needed. Type an exact answer, using radicals and i as needed.) (Type an exact answer, using π as needed.) Type an exact answer, using radicals as needed.)
List the eigenvalues of A. The transformation x+Ax is the composition of a rotation and a scaling. Give the angle φ of the rotation, where-π<φ π, and give the scale factor. 8-8 A- The eigenvalues of A are λ D (Use a comma to separate answers as needed. Type an exact answer, using radicals and i as needed.) (Type an exact answer, using π as needed.) Type an exact answer, using radicals as needed.)
Question 6 (3 points) a -- 2 points) Find the Jacobian of the transformation the shear...
 Question 6 (3 points) a -- 2 points) Find the Jacobian of the transformation the shear transformation: x = au + bv + cw, y=dy + ew, and z fw, where a, b, c, d, e, and f are positive real numbers, and describe the how the volume of the unit cube in uvw coordinates compares to the volume of its transformation in Cartesian coordinates. = b -- 1 point) State one example of a practical application shown in lecture...
Question 6 (3 points) a -- 2 points) Find the Jacobian of the transformation the shear transformation: x = au + bv + cw, y=dy + ew, and z fw, where a, b, c, d, e, and f are positive real numbers, and describe the how the volume of the unit cube in uvw coordinates compares to the volume of its transformation in Cartesian coordinates. = b -- 1 point) State one example of a practical application shown in lecture...
Question 2: 2D Homogeneous Matrices [30 Marks] For each of the following homogenous matrices, write the decomposition into simple 2D transformations (translation, rotate, scale and shear). [6 Marks e...
 Question 2: 2D Homogeneous Matrices [30 Marks] For each of the following homogenous matrices, write the decomposition into simple 2D transformations (translation, rotate, scale and shear). [6 Marks each] For example, the matrix M 10 0 0 1 Can be written as b) M2 0 0 d) M1 1 0 0.5 0.866 0 e) M 0.866 0.5 0
Question 2: 2D Homogeneous Matrices [30 Marks] For each of the following homogenous matrices, write the decomposition into simple 2D transformations (translation,...
Question 2: 2D Homogeneous Matrices [30 Marks] For each of the following homogenous matrices, write the decomposition into simple 2D transformations (translation, rotate, scale and shear). [6 Marks each] For example, the matrix M 10 0 0 1 Can be written as b) M2 0 0 d) M1 1 0 0.5 0.866 0 e) M 0.866 0.5 0
Question 2: 2D Homogeneous Matrices [30 Marks] For each of the following homogenous matrices, write the decomposition into simple 2D transformations (translation,...
(a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the...
 (a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the vector obtained by rotating x counter clockwise by 7/3 around 0. Without computing any matrices, what would you expect det (T) to be? (Does T make areas larger or smaller?) Now check your answer by using the fact that the matrix for counter clockwise rotation by is cos(0) - sin(0)] A A= sin(0) cos(0) (b) Same question as (a), only this time let T...
(a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the vector obtained by rotating x counter clockwise by 7/3 around 0. Without computing any matrices, what would you expect det (T) to be? (Does T make areas larger or smaller?) Now check your answer by using the fact that the matrix for counter clockwise rotation by is cos(0) - sin(0)] A A= sin(0) cos(0) (b) Same question as (a), only this time let T...
#1, 2, 3, 4 Problem 1 The linear transformation T : x + Cx for a...
 #1, 2, 3, 4
Problem 1 The linear transformation T : x + Cx for a vector x ERP is the composition of a rotation and a scaling if C is given as c=[. 0 0.5 -0.5 0 - [1] (1) Find the angle o of the rotation, where --<<, and the scale factor r. (2) If x without computing Cx, sketch x and the image of x under the transfor- mation T (rotation and scaling) in the RP plane....
#1, 2, 3, 4
Problem 1 The linear transformation T : x + Cx for a vector x ERP is the composition of a rotation and a scaling if C is given as c=[. 0 0.5 -0.5 0 - [1] (1) Find the angle o of the rotation, where --<<, and the scale factor r. (2) If x without computing Cx, sketch x and the image of x under the transfor- mation T (rotation and scaling) in the RP plane....
#1, 2, 3, 4 Problem 1 The linear transformation T : x + Cx for a...
 #1, 2, 3, 4
Problem 1 The linear transformation T : x + Cx for a vector x € R2 is the composition of a rotation and a scaling if C is given as C-[ 0. 0 0.5 -0.5 0 [1] (1) Find the angle o of the rotation, where - <s, and the scale factor r. (2) If x= without computing Cx, sketch x and the image of x under the transfor- mation T (rotation and scaling) in the...
#1, 2, 3, 4
Problem 1 The linear transformation T : x + Cx for a vector x € R2 is the composition of a rotation and a scaling if C is given as C-[ 0. 0 0.5 -0.5 0 [1] (1) Find the angle o of the rotation, where - <s, and the scale factor r. (2) If x= without computing Cx, sketch x and the image of x under the transfor- mation T (rotation and scaling) in the...
1. For 2-dimensional rotations by angle ϕ1 and ϕ2 prove that the rotation matrices have the...
1. For 2-dimensional rotations by angle ϕ1 and ϕ2 prove that the rotation matrices have the property, R(ϕ1+ ϕ2 ) = R(ϕ1)R(ϕ2). In other words, the combination of two rotations is a matrix of the same form. This is it is also a rotation. 2. Prove that for Galilean transformations with velocity u in the x-direction 3. Using Maxwell's equations in differential form prove that the electric and magnetic fields in free space follow the wave equation.
Calculate the concatenated transformation matrix for the following operations performed in the sequence as below: Translation...
Calculate the concatenated transformation matrix for the following operations performed in the sequence as below: Translation by 4 and 5 units along X and Y axis Change of scale by 2 units in X direction and 4 units in Y direction iii Rotation by 60° in CCW direction about Z axis passing through the point (4, 4). Find new coordinates when the transformation is carried out on a triangle ABC with A (4, 4), B (8, 4) and C (6,...
When applying (meaning multiplying) three separate types of transformation matrices to an object, where R is...
When applying (meaning multiplying) three separate types of transformation matrices to an object, where R is the Rotation matrix, S is the Scaling matrix, and T is the Translation matrix, what is the standard and appropriate order for those three operations? (Note: because of how matrix multiplication is applied, the order referred to here is from right to left) A) First T, then R, then S B) First T, then S, then R C) First R, then T, then S...
4. Find the 3 x 3 matrix that produces a rotation by 60° about the point...
 4. Find the 3 x 3 matrix that produces a rotation by 60° about the point (-4,-6) using homogeneous coordinates. (You do not have to multiply the matrices).
4. Find the 3 x 3 matrix that produces a rotation by 60° about the point (-4,-6) using homogeneous coordinates. (You do not have to multiply the matrices).
 List the eigenvalues of A. The transformation x+Ax is the composition of a rotation and a scaling. Give the angle φ of the rotation, where-π<φ π, and give the scale factor. 8-8 A- The eigenvalues of A are λ D (Use a comma to separate answers as needed. Type an exact answer, using radicals and i as needed.) (Type an exact answer, using π as needed.) Type an exact answer, using radicals as needed.)
List the eigenvalues of A. The transformation x+Ax is the composition of a rotation and a scaling. Give the angle φ of the rotation, where-π<φ π, and give the scale factor. 8-8 A- The eigenvalues of A are λ D (Use a comma to separate answers as needed. Type an exact answer, using radicals and i as needed.) (Type an exact answer, using π as needed.) Type an exact answer, using radicals as needed.)
 Question 6 (3 points) a -- 2 points) Find the Jacobian of the transformation the shear transformation: x = au + bv + cw, y=dy + ew, and z fw, where a, b, c, d, e, and f are positive real numbers, and describe the how the volume of the unit cube in uvw coordinates compares to the volume of its transformation in Cartesian coordinates. = b -- 1 point) State one example of a practical application shown in lecture...
Question 6 (3 points) a -- 2 points) Find the Jacobian of the transformation the shear transformation: x = au + bv + cw, y=dy + ew, and z fw, where a, b, c, d, e, and f are positive real numbers, and describe the how the volume of the unit cube in uvw coordinates compares to the volume of its transformation in Cartesian coordinates. = b -- 1 point) State one example of a practical application shown in lecture...
 Question 2: 2D Homogeneous Matrices [30 Marks] For each of the following homogenous matrices, write the decomposition into simple 2D transformations (translation, rotate, scale and shear). [6 Marks each] For example, the matrix M 10 0 0 1 Can be written as b) M2 0 0 d) M1 1 0 0.5 0.866 0 e) M 0.866 0.5 0
Question 2: 2D Homogeneous Matrices [30 Marks] For each of the following homogenous matrices, write the decomposition into simple 2D transformations (translation,...
Question 2: 2D Homogeneous Matrices [30 Marks] For each of the following homogenous matrices, write the decomposition into simple 2D transformations (translation, rotate, scale and shear). [6 Marks each] For example, the matrix M 10 0 0 1 Can be written as b) M2 0 0 d) M1 1 0 0.5 0.866 0 e) M 0.866 0.5 0
Question 2: 2D Homogeneous Matrices [30 Marks] For each of the following homogenous matrices, write the decomposition into simple 2D transformations (translation,...
 (a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the vector obtained by rotating x counter clockwise by 7/3 around 0. Without computing any matrices, what would you expect det (T) to be? (Does T make areas larger or smaller?) Now check your answer by using the fact that the matrix for counter clockwise rotation by is cos(0) - sin(0)] A A= sin(0) cos(0) (b) Same question as (a), only this time let T...
(a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the vector obtained by rotating x counter clockwise by 7/3 around 0. Without computing any matrices, what would you expect det (T) to be? (Does T make areas larger or smaller?) Now check your answer by using the fact that the matrix for counter clockwise rotation by is cos(0) - sin(0)] A A= sin(0) cos(0) (b) Same question as (a), only this time let T...
 #1, 2, 3, 4
Problem 1 The linear transformation T : x + Cx for a vector x ERP is the composition of a rotation and a scaling if C is given as c=[. 0 0.5 -0.5 0 - [1] (1) Find the angle o of the rotation, where --<<, and the scale factor r. (2) If x without computing Cx, sketch x and the image of x under the transfor- mation T (rotation and scaling) in the RP plane....
#1, 2, 3, 4
Problem 1 The linear transformation T : x + Cx for a vector x ERP is the composition of a rotation and a scaling if C is given as c=[. 0 0.5 -0.5 0 - [1] (1) Find the angle o of the rotation, where --<<, and the scale factor r. (2) If x without computing Cx, sketch x and the image of x under the transfor- mation T (rotation and scaling) in the RP plane....
 #1, 2, 3, 4
Problem 1 The linear transformation T : x + Cx for a vector x € R2 is the composition of a rotation and a scaling if C is given as C-[ 0. 0 0.5 -0.5 0 [1] (1) Find the angle o of the rotation, where - <s, and the scale factor r. (2) If x= without computing Cx, sketch x and the image of x under the transfor- mation T (rotation and scaling) in the...
#1, 2, 3, 4
Problem 1 The linear transformation T : x + Cx for a vector x € R2 is the composition of a rotation and a scaling if C is given as C-[ 0. 0 0.5 -0.5 0 [1] (1) Find the angle o of the rotation, where - <s, and the scale factor r. (2) If x= without computing Cx, sketch x and the image of x under the transfor- mation T (rotation and scaling) in the...
 4. Find the 3 x 3 matrix that produces a rotation by 60° about the point (-4,-6) using homogeneous coordinates. (You do not have to multiply the matrices).
4. Find the 3 x 3 matrix that produces a rotation by 60° about the point (-4,-6) using homogeneous coordinates. (You do not have to multiply the matrices).
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago