Please to (B) in depth as its for exam review. It'd be nice to see al equations you used.

Homework Answers







Matlab Code:
syms s
s=tf('s')
x=(s+3)/(s*(s+1)*(s+5)*(s+10))
rlocus(x)
Add Answer to:
Please to (B) in depth as its for exam review. It'd be nice to
see al...
Please answer BOTH mathematicaly on paper, and with matlab( as it says in the question). Thank...
 Please answer BOTH mathematicaly on paper, and with matlab( as
it says in the question). Thank you
For each of the following loop transfer function F(s), find the portion of the root locus on the real axis, asymptotes, the arrival and departure angles at any complex zero or pole, and the frequency of any imaginary-axis crossing. Sketch the root locus based on above findings. Verify your results using Matlab. Submit plots of your hand sketches and the Matlab results. a....
Please answer BOTH mathematicaly on paper, and with matlab( as
it says in the question). Thank you
For each of the following loop transfer function F(s), find the portion of the root locus on the real axis, asymptotes, the arrival and departure angles at any complex zero or pole, and the frequency of any imaginary-axis crossing. Sketch the root locus based on above findings. Verify your results using Matlab. Submit plots of your hand sketches and the Matlab results. a....
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the ...
 help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
Theroot-locus design method (d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angle...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
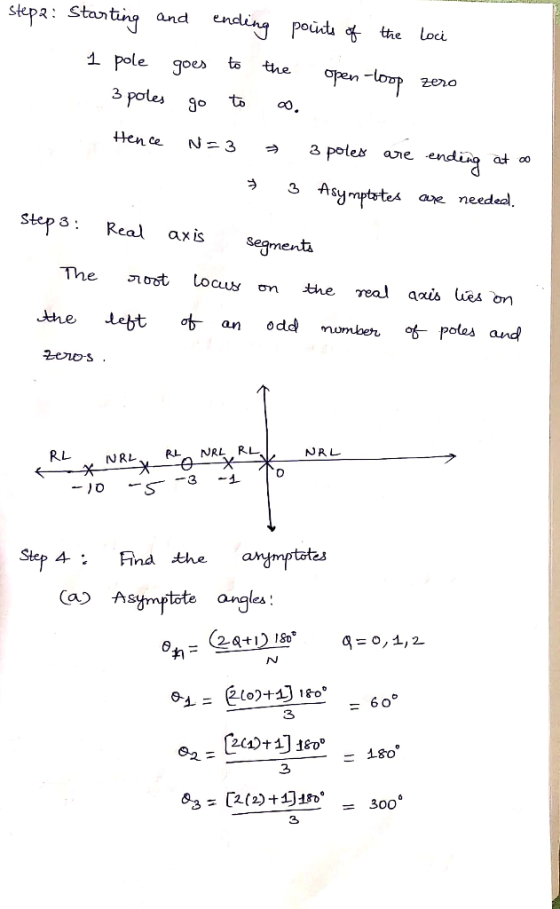
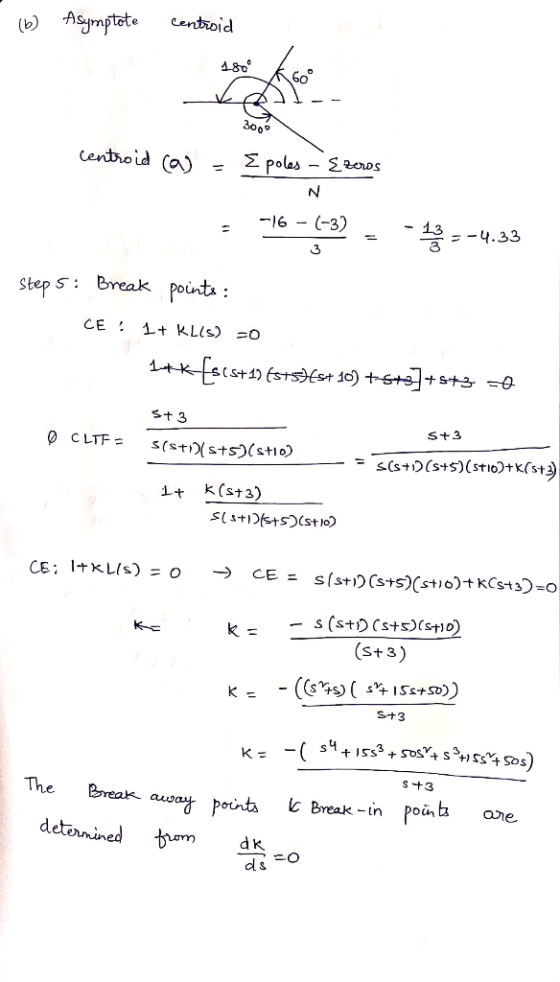
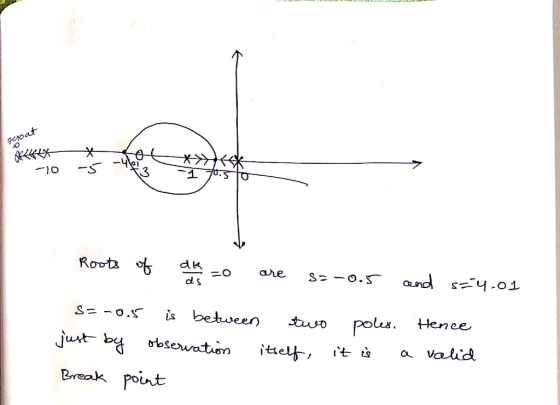
Hand sketch the root locus with respect to K for the equation 1+KL(s) = 0 where L(s) is shown below.
 Hand sketch the root locus with respect to K for the equation 1+KL(s) = 0 where L(s) is shown below. Your sketch should clearly indicate the locations of the poles (X) and the zeros (0) of the L(s). If necessary, show the location and angle of the asymptotes, location of the break-in/breakaway points, and the location at which the root locus intersects imaginary axis. After completing each hand sketch, verify your results using MATLAB. You do not submit to submit the...
Hand sketch the root locus with respect to K for the equation 1+KL(s) = 0 where L(s) is shown below. Your sketch should clearly indicate the locations of the poles (X) and the zeros (0) of the L(s). If necessary, show the location and angle of the asymptotes, location of the break-in/breakaway points, and the location at which the root locus intersects imaginary axis. After completing each hand sketch, verify your results using MATLAB. You do not submit to submit the...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to...
 The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
Sketch the asymptotes of the Bode plot magnitude and phase for each of the following open-loop...
Sketch the asymptotes of the Bode plot magnitude and phase for each of the following open-loop transfer functions. After completing the hand sketches. verify your result using Matlab. Turn in your hand sketches and the Matlab results on the same scales. 1- L(s)= 1/ s(s+1)(0.02s+1) 2- L(s)= (s+5)(s+10)/ s(s+1)(s+100)
For the following system, R(s) Y(s) s(s +4) a)Sketch its root locus. Be sure to calculate...
 For the following system, R(s) Y(s) s(s +4) a)Sketch its root locus. Be sure to calculate (and clearly label) all asymptotes, break- away/break-in points, departure/arrival angles, and imaginary axis crossings (if any) Include arrows showing the direction of closed-loop pole traversal. b) Find the smallest time constant the system will have.
For the following system, R(s) Y(s) s(s +4) a)Sketch its root locus. Be sure to calculate (and clearly label) all asymptotes, break- away/break-in points, departure/arrival angles, and imaginary axis crossings (if any) Include arrows showing the direction of closed-loop pole traversal. b) Find the smallest time constant the system will have.
Sketch the asymptotes of the bode plot magnitude and phase for each of following open loop...
Sketch the asymptotes of the bode plot magnitude and phase for each of following open loop transfer function. After completing the hand sketches verify result using MATLAB. Turn in your hand sketches and MATLAB results on the same scales. 1- KG(s)=1/s(s+1)(0.02s+1) 2- KG(s)=(s+5)(s+10)/s(s+1)(s+100) 3- KG(s)=s^2+4/s(s^2+1)
Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A....
 Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A. Sketch the root locus. Clearly show the open-loop poles and zeros, and the high-gain asymptotes on your sketch. Calculate the centroid to assure that the high gain asymptotes are accurate. B. If your sketch reveals any break-in or break-away points, calculate those location C. Does your sketch reveal a jo- crossing? If so, stability may be an issue. D. A damping ratio of 7-...
Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A. Sketch the root locus. Clearly show the open-loop poles and zeros, and the high-gain asymptotes on your sketch. Calculate the centroid to assure that the high gain asymptotes are accurate. B. If your sketch reveals any break-in or break-away points, calculate those location C. Does your sketch reveal a jo- crossing? If so, stability may be an issue. D. A damping ratio of 7-...
these are useful formjlas to solve this problem please show all work! thank you 2.) Design...
 these are useful formjlas to solve this problem
please show all work! thank you
2.) Design compensator for zero steady-state error with 10% overshoot and 0.4s of Peak time for the open loop transfer function G specified below. Sketch the comparison between uncompensated and compensated responses. Also compare their root locus. Clearly mention the improvements achieved after compensation. (50 points = 10 pts for analyzing uncompensated system+5 pts for identifying controller type+25 pts for controller design+5 pts for response comparison+5...
these are useful formjlas to solve this problem
please show all work! thank you
2.) Design compensator for zero steady-state error with 10% overshoot and 0.4s of Peak time for the open loop transfer function G specified below. Sketch the comparison between uncompensated and compensated responses. Also compare their root locus. Clearly mention the improvements achieved after compensation. (50 points = 10 pts for analyzing uncompensated system+5 pts for identifying controller type+25 pts for controller design+5 pts for response comparison+5...
 Please answer BOTH mathematicaly on paper, and with matlab( as
it says in the question). Thank you
For each of the following loop transfer function F(s), find the portion of the root locus on the real axis, asymptotes, the arrival and departure angles at any complex zero or pole, and the frequency of any imaginary-axis crossing. Sketch the root locus based on above findings. Verify your results using Matlab. Submit plots of your hand sketches and the Matlab results. a....
Please answer BOTH mathematicaly on paper, and with matlab( as
it says in the question). Thank you
For each of the following loop transfer function F(s), find the portion of the root locus on the real axis, asymptotes, the arrival and departure angles at any complex zero or pole, and the frequency of any imaginary-axis crossing. Sketch the root locus based on above findings. Verify your results using Matlab. Submit plots of your hand sketches and the Matlab results. a....
 help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
 The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
 For the following system, R(s) Y(s) s(s +4) a)Sketch its root locus. Be sure to calculate (and clearly label) all asymptotes, break- away/break-in points, departure/arrival angles, and imaginary axis crossings (if any) Include arrows showing the direction of closed-loop pole traversal. b) Find the smallest time constant the system will have.
For the following system, R(s) Y(s) s(s +4) a)Sketch its root locus. Be sure to calculate (and clearly label) all asymptotes, break- away/break-in points, departure/arrival angles, and imaginary axis crossings (if any) Include arrows showing the direction of closed-loop pole traversal. b) Find the smallest time constant the system will have.
 Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A. Sketch the root locus. Clearly show the open-loop poles and zeros, and the high-gain asymptotes on your sketch. Calculate the centroid to assure that the high gain asymptotes are accurate. B. If your sketch reveals any break-in or break-away points, calculate those location C. Does your sketch reveal a jo- crossing? If so, stability may be an issue. D. A damping ratio of 7-...
Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A. Sketch the root locus. Clearly show the open-loop poles and zeros, and the high-gain asymptotes on your sketch. Calculate the centroid to assure that the high gain asymptotes are accurate. B. If your sketch reveals any break-in or break-away points, calculate those location C. Does your sketch reveal a jo- crossing? If so, stability may be an issue. D. A damping ratio of 7-...
 these are useful formjlas to solve this problem
please show all work! thank you
2.) Design compensator for zero steady-state error with 10% overshoot and 0.4s of Peak time for the open loop transfer function G specified below. Sketch the comparison between uncompensated and compensated responses. Also compare their root locus. Clearly mention the improvements achieved after compensation. (50 points = 10 pts for analyzing uncompensated system+5 pts for identifying controller type+25 pts for controller design+5 pts for response comparison+5...
these are useful formjlas to solve this problem
please show all work! thank you
2.) Design compensator for zero steady-state error with 10% overshoot and 0.4s of Peak time for the open loop transfer function G specified below. Sketch the comparison between uncompensated and compensated responses. Also compare their root locus. Clearly mention the improvements achieved after compensation. (50 points = 10 pts for analyzing uncompensated system+5 pts for identifying controller type+25 pts for controller design+5 pts for response comparison+5...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago