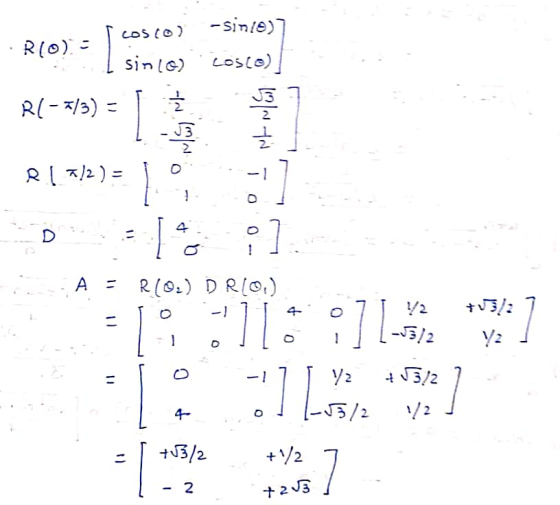
First recall that the matrix corresponding to a rotation by an angle θ is given by...
First recall that the matrix corresponding to a rotation by an
angle θ is given by
Rθ=
We build a 2-by-2 matrix by first rotating by θ1=−π/3, then
stretching using the diagonal matrix D=,
then rotating again by θ2=π/2, so that A=Rθ2DRθ1.
Now recall that the maximum stretch for a matrix A is computed
by
max ||x||=1 ||Ax||
and any vector x of norm 1 such that ||Ax|| attains this max is
called the direction of maximum stretch.
Write down the vector of maximum stretch for A in this case:
x=
Homework Answers
![| 고 | l 2 25] All | els) - Long7 As - I Bee - 9 1 | [ + [ cose +ssine] || sin( -) | | + Cosld - 3) | Ax) = J sin-lo - (3) † \](http://img.homeworklib.com/questions/5ac6f120-bcf6-11ea-b2ed-6d9838f7cf1a.png?x-oss-process=image/resize,w_560)
Add Answer to:
First recall that the matrix corresponding to a rotation by an
angle θ is given by...
First recall that the matrix corresponding to a rotation by an angle @ is given by...
 First recall that the matrix corresponding to a rotation by an angle @ is given by Ri= cos(0) -sin(0) 1 sin(0) cos(0) ] 0 as wing the diagonal maria D = ( 3 9).son , then 10 21 Build a 2-by-2 matrix by first rotating by 01 = -6, then stretching using the diagonal matrix D= rotating again by 62 = Í . A = Ry, DR, = Preview
First recall that the matrix corresponding to a rotation by an angle @ is given by Ri= cos(0) -sin(0) 1 sin(0) cos(0) ] 0 as wing the diagonal maria D = ( 3 9).son , then 10 21 Build a 2-by-2 matrix by first rotating by 01 = -6, then stretching using the diagonal matrix D= rotating again by 62 = Í . A = Ry, DR, = Preview
Find (as a unit vector with negative first term) an eigenvector of the matrix corresponding to...
 Find (as a unit vector with negative first term) an eigenvector
of the matrix
corresponding to the eigenvalue lambda = 2
2 – 30 – 6 Find (as a unit vector with negative first term) an eigenvector of the matrix 0 2 0 corresponding to the eigenvalue 1 = 2 0 - 6 4 -4 1/3 x Preview Answer: 6V154 77 V154 154 3V154 154
Find (as a unit vector with negative first term) an eigenvector
of the matrix
corresponding to the eigenvalue lambda = 2
2 – 30 – 6 Find (as a unit vector with negative first term) an eigenvector of the matrix 0 2 0 corresponding to the eigenvalue 1 = 2 0 - 6 4 -4 1/3 x Preview Answer: 6V154 77 V154 154 3V154 154
Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix w...
 Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix which represents R with respect to standard coordinates. Here are the details: The axis of rotation is the line L, spanned and oriented by the vector v (1,一1,-1) . Now rotate R3 about L through the angle t = 4 π according to the Right 3 Hand Rule Solution strategy: If we choose a right handed ordered ONB B- (a, b,r) for...
Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix which represents R with respect to standard coordinates. Here are the details: The axis of rotation is the line L, spanned and oriented by the vector v (1,一1,-1) . Now rotate R3 about L through the angle t = 4 π according to the Right 3 Hand Rule Solution strategy: If we choose a right handed ordered ONB B- (a, b,r) for...
Derive the Jones matrix, Eq. (14-15),representing a linear polarizer whose transmission axis is at arbitrary angle...
 Derive the Jones matrix, Eq. (14-15),representing a linear
polarizer whose transmission axis is at arbitrary angle θ with
respect to the horizontal #question: anyone can help to solution it
by use method in second image. ***** thoroughly solution
********
M-Linoso, cos2 θ sin θ cos θ sin θ cos θ linear polarizer, TA at θ (14-15) sin 2 θ tion 14-2 Mathematical Representation of Potarize simultancously present at each point along the axis The fast axis nd slow axis (SA)...
Derive the Jones matrix, Eq. (14-15),representing a linear
polarizer whose transmission axis is at arbitrary angle θ with
respect to the horizontal #question: anyone can help to solution it
by use method in second image. ***** thoroughly solution
********
M-Linoso, cos2 θ sin θ cos θ sin θ cos θ linear polarizer, TA at θ (14-15) sin 2 θ tion 14-2 Mathematical Representation of Potarize simultancously present at each point along the axis The fast axis nd slow axis (SA)...
Q4. Let 1.01 0.99 0.99 0.98 (a) Find the eigenvalue decomposition of A. Recall that λ is an eigenvalue of A if for some u1],u2 (entries of the corresponding eigenvector) we have (1.01 u0.99u20 99...
 Q4. Let 1.01 0.99 0.99 0.98 (a) Find the eigenvalue decomposition of A. Recall that λ is an eigenvalue of A if for some u1],u2 (entries of the corresponding eigenvector) we have (1.01 u0.99u20 99u [1] + (0.98-A)u[2] = 0. Another way of saying this is that we want the values of λ such that A-λ| (where I is the 2 x 2 identity matrix) has a non-trivial null space there is a nonzero vector u such that (A-AI)u =...
Q4. Let 1.01 0.99 0.99 0.98 (a) Find the eigenvalue decomposition of A. Recall that λ is an eigenvalue of A if for some u1],u2 (entries of the corresponding eigenvector) we have (1.01 u0.99u20 99u [1] + (0.98-A)u[2] = 0. Another way of saying this is that we want the values of λ such that A-λ| (where I is the 2 x 2 identity matrix) has a non-trivial null space there is a nonzero vector u such that (A-AI)u =...
. Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the...
 . Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the horizontal arm is denoted θ1 and the angle of the pendulum fron the vertically upward line is denoted θ2. Their corresponding angular velocities are denoted θ| and 02, respectively. The kinetic energy K and the potential energy V of the system are given by Vo COS in terms of some mechanical parameters Io, 111, 12, 112, Vo of the system that have all positive...
. Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the horizontal arm is denoted θ1 and the angle of the pendulum fron the vertically upward line is denoted θ2. Their corresponding angular velocities are denoted θ| and 02, respectively. The kinetic energy K and the potential energy V of the system are given by Vo COS in terms of some mechanical parameters Io, 111, 12, 112, Vo of the system that have all positive...
A force F⃗ of magnitude F making an angle θ with the x axis is applied...
 A force F⃗ of magnitude F making an angle θ with the x axis is
applied to a particle located along axis of rotation A, at
Cartesian coordinates (0,0) in the figure. The vector F⃗ lies in
the xy plane, and the four axes of rotation A, B, C, and D all lie
perpendicular to the xy plane.
A particle is located at a vector position r⃗ r→r_vec with
respect to an axis of rotation (thus r⃗ r→r_vec points from...
A force F⃗ of magnitude F making an angle θ with the x axis is
applied to a particle located along axis of rotation A, at
Cartesian coordinates (0,0) in the figure. The vector F⃗ lies in
the xy plane, and the four axes of rotation A, B, C, and D all lie
perpendicular to the xy plane.
A particle is located at a vector position r⃗ r→r_vec with
respect to an axis of rotation (thus r⃗ r→r_vec points from...
Heres example 10.2 (3) (30 points) In Example 10.2, the moment of inertia tensor for a...
 Heres example 10.2
(3) (30 points) In Example 10.2, the moment of inertia tensor for a uniform solid cube of mass Mand side a is calculated for rotation about a corner of the cube. It also worked out the angular momentum of the cube when rotated about the x-axis - see Equation 10.51. (a) Find the total kinetic energy of the cube when rotated about the x-axis. (b) Example 10.4 finds the principal axes of this cube. It shows that...
Heres example 10.2
(3) (30 points) In Example 10.2, the moment of inertia tensor for a uniform solid cube of mass Mand side a is calculated for rotation about a corner of the cube. It also worked out the angular momentum of the cube when rotated about the x-axis - see Equation 10.51. (a) Find the total kinetic energy of the cube when rotated about the x-axis. (b) Example 10.4 finds the principal axes of this cube. It shows that...
Function LUfac_solver.m is provided here: function [x] = LUfac_solver(LU,b,piv) % % function [x] = LUfac_solver(lu,b) %...
 Function LUfac_solver.m is provided here:
function [x] = LUfac_solver(LU,b,piv)
%
% function [x] = LUfac_solver(lu,b)
%
% This program employs the LU factorization to solve the linear
system Ax=b.
%
% Input
% LU: lu matrix from GEpivot_new function
% b: right side column vector (ordered corresponding to original
vector
% sent to GEpivot_new)
% piv: vector indicating the pivoting (row interchanges that
took place
% during GE
%
% Output
% x: solution vector
%
% Written by Steve...
Function LUfac_solver.m is provided here:
function [x] = LUfac_solver(LU,b,piv)
%
% function [x] = LUfac_solver(lu,b)
%
% This program employs the LU factorization to solve the linear
system Ax=b.
%
% Input
% LU: lu matrix from GEpivot_new function
% b: right side column vector (ordered corresponding to original
vector
% sent to GEpivot_new)
% piv: vector indicating the pivoting (row interchanges that
took place
% during GE
%
% Output
% x: solution vector
%
% Written by Steve...
NEED HELP WITH PROBLEM 1 AND 2 OF THIS LAB. I NEED TO PUT IT INTO...
 NEED HELP WITH PROBLEM 1 AND 2 OF THIS LAB. I NEED TO PUT IT
INTO PYTHON CODE! THANK YOU!
LAB 9 - ITERATIVE METHODS FOR EIGENVALUES AND MARKOV CHAINS 1. POWER ITERATION The power method is designed to find the dominant' eigenvalue and corresponding eigen- vector for an n x n matrix A. The dominant eigenvalue is the largest in absolute value. This means if a 4 x 4 matrix has eigenvalues -4, 3, 2,-1 then the power method...
NEED HELP WITH PROBLEM 1 AND 2 OF THIS LAB. I NEED TO PUT IT
INTO PYTHON CODE! THANK YOU!
LAB 9 - ITERATIVE METHODS FOR EIGENVALUES AND MARKOV CHAINS 1. POWER ITERATION The power method is designed to find the dominant' eigenvalue and corresponding eigen- vector for an n x n matrix A. The dominant eigenvalue is the largest in absolute value. This means if a 4 x 4 matrix has eigenvalues -4, 3, 2,-1 then the power method...
 First recall that the matrix corresponding to a rotation by an angle @ is given by Ri= cos(0) -sin(0) 1 sin(0) cos(0) ] 0 as wing the diagonal maria D = ( 3 9).son , then 10 21 Build a 2-by-2 matrix by first rotating by 01 = -6, then stretching using the diagonal matrix D= rotating again by 62 = Í . A = Ry, DR, = Preview
First recall that the matrix corresponding to a rotation by an angle @ is given by Ri= cos(0) -sin(0) 1 sin(0) cos(0) ] 0 as wing the diagonal maria D = ( 3 9).son , then 10 21 Build a 2-by-2 matrix by first rotating by 01 = -6, then stretching using the diagonal matrix D= rotating again by 62 = Í . A = Ry, DR, = Preview
 Find (as a unit vector with negative first term) an eigenvector
of the matrix
corresponding to the eigenvalue lambda = 2
2 – 30 – 6 Find (as a unit vector with negative first term) an eigenvector of the matrix 0 2 0 corresponding to the eigenvalue 1 = 2 0 - 6 4 -4 1/3 x Preview Answer: 6V154 77 V154 154 3V154 154
Find (as a unit vector with negative first term) an eigenvector
of the matrix
corresponding to the eigenvalue lambda = 2
2 – 30 – 6 Find (as a unit vector with negative first term) an eigenvector of the matrix 0 2 0 corresponding to the eigenvalue 1 = 2 0 - 6 4 -4 1/3 x Preview Answer: 6V154 77 V154 154 3V154 154
 Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix which represents R with respect to standard coordinates. Here are the details: The axis of rotation is the line L, spanned and oriented by the vector v (1,一1,-1) . Now rotate R3 about L through the angle t = 4 π according to the Right 3 Hand Rule Solution strategy: If we choose a right handed ordered ONB B- (a, b,r) for...
Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix which represents R with respect to standard coordinates. Here are the details: The axis of rotation is the line L, spanned and oriented by the vector v (1,一1,-1) . Now rotate R3 about L through the angle t = 4 π according to the Right 3 Hand Rule Solution strategy: If we choose a right handed ordered ONB B- (a, b,r) for...
 Derive the Jones matrix, Eq. (14-15),representing a linear
polarizer whose transmission axis is at arbitrary angle θ with
respect to the horizontal #question: anyone can help to solution it
by use method in second image. ***** thoroughly solution
********
M-Linoso, cos2 θ sin θ cos θ sin θ cos θ linear polarizer, TA at θ (14-15) sin 2 θ tion 14-2 Mathematical Representation of Potarize simultancously present at each point along the axis The fast axis nd slow axis (SA)...
Derive the Jones matrix, Eq. (14-15),representing a linear
polarizer whose transmission axis is at arbitrary angle θ with
respect to the horizontal #question: anyone can help to solution it
by use method in second image. ***** thoroughly solution
********
M-Linoso, cos2 θ sin θ cos θ sin θ cos θ linear polarizer, TA at θ (14-15) sin 2 θ tion 14-2 Mathematical Representation of Potarize simultancously present at each point along the axis The fast axis nd slow axis (SA)...
 Q4. Let 1.01 0.99 0.99 0.98 (a) Find the eigenvalue decomposition of A. Recall that λ is an eigenvalue of A if for some u1],u2 (entries of the corresponding eigenvector) we have (1.01 u0.99u20 99u [1] + (0.98-A)u[2] = 0. Another way of saying this is that we want the values of λ such that A-λ| (where I is the 2 x 2 identity matrix) has a non-trivial null space there is a nonzero vector u such that (A-AI)u =...
Q4. Let 1.01 0.99 0.99 0.98 (a) Find the eigenvalue decomposition of A. Recall that λ is an eigenvalue of A if for some u1],u2 (entries of the corresponding eigenvector) we have (1.01 u0.99u20 99u [1] + (0.98-A)u[2] = 0. Another way of saying this is that we want the values of λ such that A-λ| (where I is the 2 x 2 identity matrix) has a non-trivial null space there is a nonzero vector u such that (A-AI)u =...
 . Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the horizontal arm is denoted θ1 and the angle of the pendulum fron the vertically upward line is denoted θ2. Their corresponding angular velocities are denoted θ| and 02, respectively. The kinetic energy K and the potential energy V of the system are given by Vo COS in terms of some mechanical parameters Io, 111, 12, 112, Vo of the system that have all positive...
. Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the horizontal arm is denoted θ1 and the angle of the pendulum fron the vertically upward line is denoted θ2. Their corresponding angular velocities are denoted θ| and 02, respectively. The kinetic energy K and the potential energy V of the system are given by Vo COS in terms of some mechanical parameters Io, 111, 12, 112, Vo of the system that have all positive...
 A force F⃗ of magnitude F making an angle θ with the x axis is
applied to a particle located along axis of rotation A, at
Cartesian coordinates (0,0) in the figure. The vector F⃗ lies in
the xy plane, and the four axes of rotation A, B, C, and D all lie
perpendicular to the xy plane.
A particle is located at a vector position r⃗ r→r_vec with
respect to an axis of rotation (thus r⃗ r→r_vec points from...
A force F⃗ of magnitude F making an angle θ with the x axis is
applied to a particle located along axis of rotation A, at
Cartesian coordinates (0,0) in the figure. The vector F⃗ lies in
the xy plane, and the four axes of rotation A, B, C, and D all lie
perpendicular to the xy plane.
A particle is located at a vector position r⃗ r→r_vec with
respect to an axis of rotation (thus r⃗ r→r_vec points from...
 Heres example 10.2
(3) (30 points) In Example 10.2, the moment of inertia tensor for a uniform solid cube of mass Mand side a is calculated for rotation about a corner of the cube. It also worked out the angular momentum of the cube when rotated about the x-axis - see Equation 10.51. (a) Find the total kinetic energy of the cube when rotated about the x-axis. (b) Example 10.4 finds the principal axes of this cube. It shows that...
Heres example 10.2
(3) (30 points) In Example 10.2, the moment of inertia tensor for a uniform solid cube of mass Mand side a is calculated for rotation about a corner of the cube. It also worked out the angular momentum of the cube when rotated about the x-axis - see Equation 10.51. (a) Find the total kinetic energy of the cube when rotated about the x-axis. (b) Example 10.4 finds the principal axes of this cube. It shows that...
 Function LUfac_solver.m is provided here:
function [x] = LUfac_solver(LU,b,piv)
%
% function [x] = LUfac_solver(lu,b)
%
% This program employs the LU factorization to solve the linear
system Ax=b.
%
% Input
% LU: lu matrix from GEpivot_new function
% b: right side column vector (ordered corresponding to original
vector
% sent to GEpivot_new)
% piv: vector indicating the pivoting (row interchanges that
took place
% during GE
%
% Output
% x: solution vector
%
% Written by Steve...
Function LUfac_solver.m is provided here:
function [x] = LUfac_solver(LU,b,piv)
%
% function [x] = LUfac_solver(lu,b)
%
% This program employs the LU factorization to solve the linear
system Ax=b.
%
% Input
% LU: lu matrix from GEpivot_new function
% b: right side column vector (ordered corresponding to original
vector
% sent to GEpivot_new)
% piv: vector indicating the pivoting (row interchanges that
took place
% during GE
%
% Output
% x: solution vector
%
% Written by Steve...
 NEED HELP WITH PROBLEM 1 AND 2 OF THIS LAB. I NEED TO PUT IT
INTO PYTHON CODE! THANK YOU!
LAB 9 - ITERATIVE METHODS FOR EIGENVALUES AND MARKOV CHAINS 1. POWER ITERATION The power method is designed to find the dominant' eigenvalue and corresponding eigen- vector for an n x n matrix A. The dominant eigenvalue is the largest in absolute value. This means if a 4 x 4 matrix has eigenvalues -4, 3, 2,-1 then the power method...
NEED HELP WITH PROBLEM 1 AND 2 OF THIS LAB. I NEED TO PUT IT
INTO PYTHON CODE! THANK YOU!
LAB 9 - ITERATIVE METHODS FOR EIGENVALUES AND MARKOV CHAINS 1. POWER ITERATION The power method is designed to find the dominant' eigenvalue and corresponding eigen- vector for an n x n matrix A. The dominant eigenvalue is the largest in absolute value. This means if a 4 x 4 matrix has eigenvalues -4, 3, 2,-1 then the power method...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago