
Homework Answers
![75 +12 YO! Ś (5+015+4)(8+3) het, - = $15+1)(519)5+3) 75+12 A + B +sti 5+4 st3 15+12 This > A[ sis+vis+3)(s+a)] +B[ sus+)(st33](http://img.homeworklib.com/questions/a9a8faa0-d138-11ea-bab6-cfbdf264522e.png?x-oss-process=image/resize,w_560)
![3 75+12 - WLES+25+3)(8+4)] + b[ses+01+3)(8+13) + [5(5+3) (s+)) - { $$t121543) +{{sis+y)s+43] compaye the co-efficients of](http://img.homeworklib.com/questions/aa495500-d138-11ea-9f01-41a27f184552.png?x-oss-process=image/resize,w_560)
Add Answer to:
The following control system is given U(s) E(s) 7s +12 (s+2)(+6) G() GS) At the time...
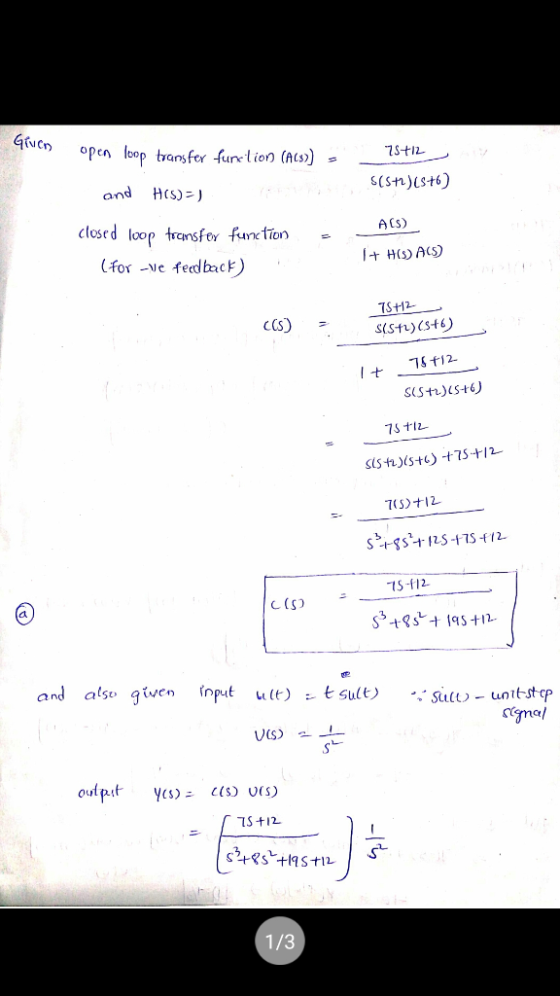
12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time...
 12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time (sec) a) Write the Laplace transform of the input signal. b) What is the transform of the output c Find the output of the system in time domain.
12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time (sec) a) Write the Laplace transform of the input signal. b) What is the transform of the output c Find the output of the system in time domain.
QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) =...
 QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) = (1 - e-3t)u(t) (a) Determine the impulse response, h(t), of the system. (b) Use the linearity and time invariance properties to determine the response of the system to the input x(t) = 38(t) + 2u(t – 2). (c) Determine the frequency response of the system H(jw). [Hint: Use the tables in the formula sheet]. (d) Hence determine the output y(t) for the input signal...
QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) = (1 - e-3t)u(t) (a) Determine the impulse response, h(t), of the system. (b) Use the linearity and time invariance properties to determine the response of the system to the input x(t) = 38(t) + 2u(t – 2). (c) Determine the frequency response of the system H(jw). [Hint: Use the tables in the formula sheet]. (d) Hence determine the output y(t) for the input signal...
Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S...
 Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S G2(s) 100 G2(s)= s(s+10) H(s) H(s) 1 1. If n(t) 0, r(t)=5+2t+10t?, make e 0.1, k-? 2. If n(t)=t, r(t)=5+2t+10t2, k=1, e=? sS I ess0.1, k=?. Question14 A control system shown in following Figure, obtain the steady-state error transfer function E(s)/N(s). N(s) E(S) GS C(S) G.(S) R(s) H(s) Question12 Obtain both analytically and computationally the rise time, peak time, maximum overshoot, and settling time...
Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S G2(s) 100 G2(s)= s(s+10) H(s) H(s) 1 1. If n(t) 0, r(t)=5+2t+10t?, make e 0.1, k-? 2. If n(t)=t, r(t)=5+2t+10t2, k=1, e=? sS I ess0.1, k=?. Question14 A control system shown in following Figure, obtain the steady-state error transfer function E(s)/N(s). N(s) E(S) GS C(S) G.(S) R(s) H(s) Question12 Obtain both analytically and computationally the rise time, peak time, maximum overshoot, and settling time...
QUESTION 2 Given that a control system has a forward path of G(s) and negative unity...
 QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1....
 Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
Automatic Course.. Please answer S4 The differential equation that de s cribe Control System is given...
 Automatic Course.. Please answer
S4 The differential equation that de s cribe Control System is given as y is the system out fut and u is the where inPut signal a) Find the system resPonse yct),if the input Signal is unit step at t 2 scend Uelue b) what is the outPut
Automatic Course.. Please answer
S4 The differential equation that de s cribe Control System is given as y is the system out fut and u is the where inPut signal a) Find the system resPonse yct),if the input Signal is unit step at t 2 scend Uelue b) what is the outPut
Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to...
 Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to a unit step input u(t) is known to be input of u(t) and an output of y(t). The forced response portion 1 Ys) (3 +3s2+ 4s +5) = a) Determine the input-output differential equation for the system b) From your result in a), determine the transformed free response Yee (s) corresponding to initial conditions of: y(0)= y(0) = 0 and ý(0)-6 Part B (20pts)...
Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to a unit step input u(t) is known to be input of u(t) and an output of y(t). The forced response portion 1 Ys) (3 +3s2+ 4s +5) = a) Determine the input-output differential equation for the system b) From your result in a), determine the transformed free response Yee (s) corresponding to initial conditions of: y(0)= y(0) = 0 and ý(0)-6 Part B (20pts)...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Control Systems 3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system...
 Control Systems
3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system using Mason's gain (18 marks) G9 G Gs Gi G2 G3 G4 GS G6 UO юү Hi H2 H3
Control Systems
3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system using Mason's gain (18 marks) G9 G Gs Gi G2 G3 G4 GS G6 UO юү Hi H2 H3
14. An LTI system has the following transfer function, determine the output system response y(t) due...
 14. An LTI system has the following transfer function, determine the output system response y(t) due to the input x(t) e u(t) H(s) s+2 S+7s+12 Answer: y(t)
14. An LTI system has the following transfer function, determine the output system response y(t) due to the input x(t) e u(t) H(s) s+2 S+7s+12 Answer: y(t)
 12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time (sec) a) Write the Laplace transform of the input signal. b) What is the transform of the output c Find the output of the system in time domain.
12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time (sec) a) Write the Laplace transform of the input signal. b) What is the transform of the output c Find the output of the system in time domain.
 QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) = (1 - e-3t)u(t) (a) Determine the impulse response, h(t), of the system. (b) Use the linearity and time invariance properties to determine the response of the system to the input x(t) = 38(t) + 2u(t – 2). (c) Determine the frequency response of the system H(jw). [Hint: Use the tables in the formula sheet]. (d) Hence determine the output y(t) for the input signal...
QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) = (1 - e-3t)u(t) (a) Determine the impulse response, h(t), of the system. (b) Use the linearity and time invariance properties to determine the response of the system to the input x(t) = 38(t) + 2u(t – 2). (c) Determine the frequency response of the system H(jw). [Hint: Use the tables in the formula sheet]. (d) Hence determine the output y(t) for the input signal...
 Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S G2(s) 100 G2(s)= s(s+10) H(s) H(s) 1 1. If n(t) 0, r(t)=5+2t+10t?, make e 0.1, k-? 2. If n(t)=t, r(t)=5+2t+10t2, k=1, e=? sS I ess0.1, k=?. Question14 A control system shown in following Figure, obtain the steady-state error transfer function E(s)/N(s). N(s) E(S) GS C(S) G.(S) R(s) H(s) Question12 Obtain both analytically and computationally the rise time, peak time, maximum overshoot, and settling time...
Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S G2(s) 100 G2(s)= s(s+10) H(s) H(s) 1 1. If n(t) 0, r(t)=5+2t+10t?, make e 0.1, k-? 2. If n(t)=t, r(t)=5+2t+10t2, k=1, e=? sS I ess0.1, k=?. Question14 A control system shown in following Figure, obtain the steady-state error transfer function E(s)/N(s). N(s) E(S) GS C(S) G.(S) R(s) H(s) Question12 Obtain both analytically and computationally the rise time, peak time, maximum overshoot, and settling time...
 QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
 Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
 Automatic Course.. Please answer
S4 The differential equation that de s cribe Control System is given as y is the system out fut and u is the where inPut signal a) Find the system resPonse yct),if the input Signal is unit step at t 2 scend Uelue b) what is the outPut
Automatic Course.. Please answer
S4 The differential equation that de s cribe Control System is given as y is the system out fut and u is the where inPut signal a) Find the system resPonse yct),if the input Signal is unit step at t 2 scend Uelue b) what is the outPut
 Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to a unit step input u(t) is known to be input of u(t) and an output of y(t). The forced response portion 1 Ys) (3 +3s2+ 4s +5) = a) Determine the input-output differential equation for the system b) From your result in a), determine the transformed free response Yee (s) corresponding to initial conditions of: y(0)= y(0) = 0 and ý(0)-6 Part B (20pts)...
Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to a unit step input u(t) is known to be input of u(t) and an output of y(t). The forced response portion 1 Ys) (3 +3s2+ 4s +5) = a) Determine the input-output differential equation for the system b) From your result in a), determine the transformed free response Yee (s) corresponding to initial conditions of: y(0)= y(0) = 0 and ý(0)-6 Part B (20pts)...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 Control Systems
3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system using Mason's gain (18 marks) G9 G Gs Gi G2 G3 G4 GS G6 UO юү Hi H2 H3
Control Systems
3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system using Mason's gain (18 marks) G9 G Gs Gi G2 G3 G4 GS G6 UO юү Hi H2 H3
 14. An LTI system has the following transfer function, determine the output system response y(t) due to the input x(t) e u(t) H(s) s+2 S+7s+12 Answer: y(t)
14. An LTI system has the following transfer function, determine the output system response y(t) due to the input x(t) e u(t) H(s) s+2 S+7s+12 Answer: y(t)
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago