

Homework Answers
1- 2- 3- 1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for...
 1-
2-
3-
1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for R3. Then express x as a linear 3 4 combination of the u's. u -3 U2 = 0 ,u3 5 6 -2 2 -1 (10 points) Suppose a vector y is orthogonal to vectors u and v. Prove that y is orthogonal to the vector 4u - 3v. 10. (2 points each) True or False: ( ) Eigenvalues must be nonzero scalars. ( )...
1-
2-
3-
1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for R3. Then express x as a linear 3 4 combination of the u's. u -3 U2 = 0 ,u3 5 6 -2 2 -1 (10 points) Suppose a vector y is orthogonal to vectors u and v. Prove that y is orthogonal to the vector 4u - 3v. 10. (2 points each) True or False: ( ) Eigenvalues must be nonzero scalars. ( )...
1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0...
 1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0 2 0 3 0 0 :) i. Compute the eigenvectors ū1, U2, U3 of A. ii. Verify that the matrix S with columns ū ū2, öz has full rank. iii. Use the Gram-Schmidt process to change B into an orthogonal matrix P.
1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0 2 0 3 0 0 :) i. Compute the eigenvectors ū1, U2, U3 of A. ii. Verify that the matrix S with columns ū ū2, öz has full rank. iii. Use the Gram-Schmidt process to change B into an orthogonal matrix P.
1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29...
 1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29 ( 7 Answer the following questions and give proper explanations. (a) Is {ui, U2, uz} a basis for R3? (b) Is {ui, U2, u4} a basis for R4? (c) Is {ui, U2, U3, U4, u; } a basis for R? (d) Is {ui, U2, U3, u} a basis for Rº?! (e) Are ui, u, and O linearly independent?! Problem 6. (15 points). Let A...
1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29 ( 7 Answer the following questions and give proper explanations. (a) Is {ui, U2, uz} a basis for R3? (b) Is {ui, U2, u4} a basis for R4? (c) Is {ui, U2, U3, U4, u; } a basis for R? (d) Is {ui, U2, U3, u} a basis for Rº?! (e) Are ui, u, and O linearly independent?! Problem 6. (15 points). Let A...
3. [1 mark each] Determine which of the following statements are true and which are false....
 3. [1 mark each] Determine which of the following statements are true and which are false. (a) The inverse of a rotation matrix (Rº) is (R-8). (b) If the vectors V1, V2, ..., Vk are such that no two of these vectors are scalar multiples of each other then they must form a linearly independent set. (c) The set containing just the zero vector, {0}, is a subspace of R”. (d) If v, w E R3 then span(v, w) must...
3. [1 mark each] Determine which of the following statements are true and which are false. (a) The inverse of a rotation matrix (Rº) is (R-8). (b) If the vectors V1, V2, ..., Vk are such that no two of these vectors are scalar multiples of each other then they must form a linearly independent set. (c) The set containing just the zero vector, {0}, is a subspace of R”. (d) If v, w E R3 then span(v, w) must...
Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z...
 Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z = 0 First, solve the system, then assign parameters s and t to the free variables (in this order), and write the solution in vector form as su + tv. Now normalize u to have norm 1 and call it ū. Then find the component of v orthogonal to the line spanned by u and normalize it, call it ū. Below, enter the components...
Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z = 0 First, solve the system, then assign parameters s and t to the free variables (in this order), and write the solution in vector form as su + tv. Now normalize u to have norm 1 and call it ū. Then find the component of v orthogonal to the line spanned by u and normalize it, call it ū. Below, enter the components...
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal co...
 2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal complement of the space 0 Span 2,2 Do not simply compute the cross product. (c) Let A be a 5 × 2 rnatrix with linearly independent columns. Using the rank-nullity theorem applied to AT, and any other results from the course, find the dinension of Col(A)
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector...
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal complement of the space 0 Span 2,2 Do not simply compute the cross product. (c) Let A be a 5 × 2 rnatrix with linearly independent columns. Using the rank-nullity theorem applied to AT, and any other results from the course, find the dinension of Col(A)
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector...
I am looking for how to explain #4 part b. I have gotten the matrix A...
 I am looking for how to explain #4 part b. I have gotten the
matrix A and I believe the answer is W = span{ v1 u2 u3 } however
I'm not really sure if that is correct or not. Please give a small
explanation. Also im not sure if I need to represent the vectors in
A as columns or rows, or if either one works.
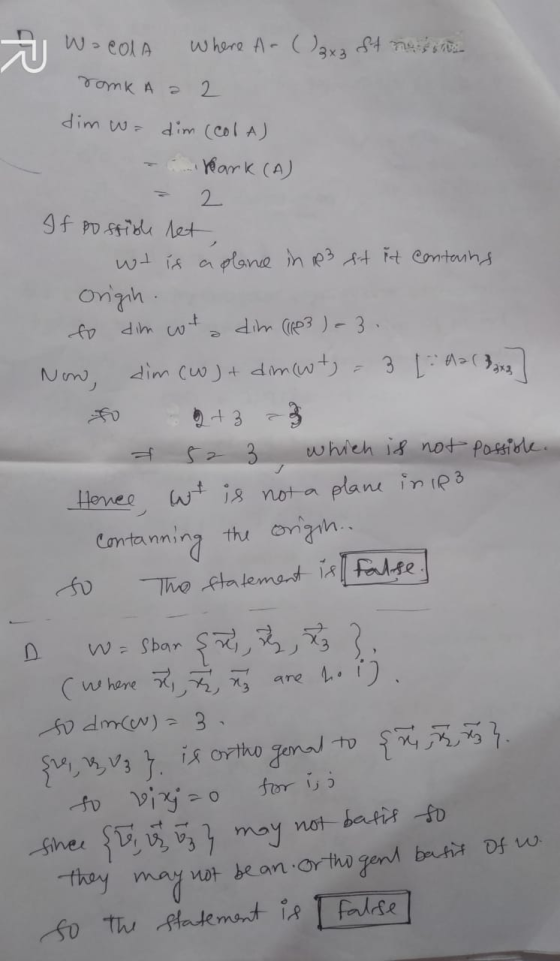
For the next two problems, W is the subspace of R4 given by...
I am looking for how to explain #4 part b. I have gotten the
matrix A and I believe the answer is W = span{ v1 u2 u3 } however
I'm not really sure if that is correct or not. Please give a small
explanation. Also im not sure if I need to represent the vectors in
A as columns or rows, or if either one works.
For the next two problems, W is the subspace of R4 given by...
1. True or False. Decide whether the following statements are true or false. Circle your answer...
 1. True or False. Decide whether the following statements are true or false. Circle your answer (no explanation needed). (a) (3 points) If ū1, víz, vz, ū are vectors for R“, and {vi, uz, uz} is lincarly independent, then {61, U2, U3, } is also lincarly independent. True False (b) (3 points) If ū is a vector in R™ and W is a subspace of R", and ū= projw (ū) is the closest point on W to ū, then i...
1. True or False. Decide whether the following statements are true or false. Circle your answer (no explanation needed). (a) (3 points) If ū1, víz, vz, ū are vectors for R“, and {vi, uz, uz} is lincarly independent, then {61, U2, U3, } is also lincarly independent. True False (b) (3 points) If ū is a vector in R™ and W is a subspace of R", and ū= projw (ū) is the closest point on W to ū, then i...
Given the matrix A = 1 0 −1 1 3 2 6 −1 0 7...
Given the matrix A = 1 0 −1 1 3 2 6 −1 0 7 −1 6 2 −3 −2 b) If W = span{[1,0,−1,1,3], [2,6,−1,0,7], [−1,6,2,−3,−2]}, find a basis for the orthogonal complement W⊥ of W. c) Construct an orthogonal basis for col(A) containing vector [1 2 −1] . d) Find the projection of the vector v =[−3 3 1] onto col(A). Please show all work and steps clearly so I can follow your logic and learn...
Please do only e and f and show work null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Fin...
 Please do only e and f and show work
null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Find bases for the four fundamental subspaces of 1 1 1 6 -1 0 1 -1 2 A= -2 3 1 -2 1 4 1 6 1 3 8. Given a subspace W of R", define the orthogonal complement of W to be W vE R u v 0 for every u E W (a) Let W span(e, e2)...
Please do only e and f and show work
null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Find bases for the four fundamental subspaces of 1 1 1 6 -1 0 1 -1 2 A= -2 3 1 -2 1 4 1 6 1 3 8. Given a subspace W of R", define the orthogonal complement of W to be W vE R u v 0 for every u E W (a) Let W span(e, e2)...
 1-
2-
3-
1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for R3. Then express x as a linear 3 4 combination of the u's. u -3 U2 = 0 ,u3 5 6 -2 2 -1 (10 points) Suppose a vector y is orthogonal to vectors u and v. Prove that y is orthogonal to the vector 4u - 3v. 10. (2 points each) True or False: ( ) Eigenvalues must be nonzero scalars. ( )...
1-
2-
3-
1 (10 points) Show that {u1, U2, U3} is an orthogonal basis for R3. Then express x as a linear 3 4 combination of the u's. u -3 U2 = 0 ,u3 5 6 -2 2 -1 (10 points) Suppose a vector y is orthogonal to vectors u and v. Prove that y is orthogonal to the vector 4u - 3v. 10. (2 points each) True or False: ( ) Eigenvalues must be nonzero scalars. ( )...
 1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0 2 0 3 0 0 :) i. Compute the eigenvectors ū1, U2, U3 of A. ii. Verify that the matrix S with columns ū ū2, öz has full rank. iii. Use the Gram-Schmidt process to change B into an orthogonal matrix P.
1. (50 pts.) Let A be the 3 x 3 matrix A= 0 0 3 0 2 0 3 0 0 :) i. Compute the eigenvectors ū1, U2, U3 of A. ii. Verify that the matrix S with columns ū ū2, öz has full rank. iii. Use the Gram-Schmidt process to change B into an orthogonal matrix P.
 1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29 ( 7 Answer the following questions and give proper explanations. (a) Is {ui, U2, uz} a basis for R3? (b) Is {ui, U2, u4} a basis for R4? (c) Is {ui, U2, U3, U4, u; } a basis for R? (d) Is {ui, U2, U3, u} a basis for Rº?! (e) Are ui, u, and O linearly independent?! Problem 6. (15 points). Let A...
1 -1.2 5 Uį = U2 = -3 1, U3 = 2 , 14 = 29 ( 7 Answer the following questions and give proper explanations. (a) Is {ui, U2, uz} a basis for R3? (b) Is {ui, U2, u4} a basis for R4? (c) Is {ui, U2, U3, U4, u; } a basis for R? (d) Is {ui, U2, U3, u} a basis for Rº?! (e) Are ui, u, and O linearly independent?! Problem 6. (15 points). Let A...
 3. [1 mark each] Determine which of the following statements are true and which are false. (a) The inverse of a rotation matrix (Rº) is (R-8). (b) If the vectors V1, V2, ..., Vk are such that no two of these vectors are scalar multiples of each other then they must form a linearly independent set. (c) The set containing just the zero vector, {0}, is a subspace of R”. (d) If v, w E R3 then span(v, w) must...
3. [1 mark each] Determine which of the following statements are true and which are false. (a) The inverse of a rotation matrix (Rº) is (R-8). (b) If the vectors V1, V2, ..., Vk are such that no two of these vectors are scalar multiples of each other then they must form a linearly independent set. (c) The set containing just the zero vector, {0}, is a subspace of R”. (d) If v, w E R3 then span(v, w) must...
 Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z = 0 First, solve the system, then assign parameters s and t to the free variables (in this order), and write the solution in vector form as su + tv. Now normalize u to have norm 1 and call it ū. Then find the component of v orthogonal to the line spanned by u and normalize it, call it ū. Below, enter the components...
Find an ONB (orthonormal basis) for the following plane in R3 2 + y + 3z = 0 First, solve the system, then assign parameters s and t to the free variables (in this order), and write the solution in vector form as su + tv. Now normalize u to have norm 1 and call it ū. Then find the component of v orthogonal to the line spanned by u and normalize it, call it ū. Below, enter the components...
 2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal complement of the space 0 Span 2,2 Do not simply compute the cross product. (c) Let A be a 5 × 2 rnatrix with linearly independent columns. Using the rank-nullity theorem applied to AT, and any other results from the course, find the dinension of Col(A)
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector...
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector v in the orthogonal complement of the space 0 Span 2,2 Do not simply compute the cross product. (c) Let A be a 5 × 2 rnatrix with linearly independent columns. Using the rank-nullity theorem applied to AT, and any other results from the course, find the dinension of Col(A)
2. (a) Show that is an orthogonal basis for R3. (b) Find a non-zero vector...
 I am looking for how to explain #4 part b. I have gotten the
matrix A and I believe the answer is W = span{ v1 u2 u3 } however
I'm not really sure if that is correct or not. Please give a small
explanation. Also im not sure if I need to represent the vectors in
A as columns or rows, or if either one works.
For the next two problems, W is the subspace of R4 given by...
I am looking for how to explain #4 part b. I have gotten the
matrix A and I believe the answer is W = span{ v1 u2 u3 } however
I'm not really sure if that is correct or not. Please give a small
explanation. Also im not sure if I need to represent the vectors in
A as columns or rows, or if either one works.
For the next two problems, W is the subspace of R4 given by...
 1. True or False. Decide whether the following statements are true or false. Circle your answer (no explanation needed). (a) (3 points) If ū1, víz, vz, ū are vectors for R“, and {vi, uz, uz} is lincarly independent, then {61, U2, U3, } is also lincarly independent. True False (b) (3 points) If ū is a vector in R™ and W is a subspace of R", and ū= projw (ū) is the closest point on W to ū, then i...
1. True or False. Decide whether the following statements are true or false. Circle your answer (no explanation needed). (a) (3 points) If ū1, víz, vz, ū are vectors for R“, and {vi, uz, uz} is lincarly independent, then {61, U2, U3, } is also lincarly independent. True False (b) (3 points) If ū is a vector in R™ and W is a subspace of R", and ū= projw (ū) is the closest point on W to ū, then i...
 Please do only e and f and show work
null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Find bases for the four fundamental subspaces of 1 1 1 6 -1 0 1 -1 2 A= -2 3 1 -2 1 4 1 6 1 3 8. Given a subspace W of R", define the orthogonal complement of W to be W vE R u v 0 for every u E W (a) Let W span(e, e2)...
Please do only e and f and show work
null(AT) null(A) T col(A) row(A) Figure 5.6 The four fundamental subspaces (f) Find bases for the four fundamental subspaces of 1 1 1 6 -1 0 1 -1 2 A= -2 3 1 -2 1 4 1 6 1 3 8. Given a subspace W of R", define the orthogonal complement of W to be W vE R u v 0 for every u E W (a) Let W span(e, e2)...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 11 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 11 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 11 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 11 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 11 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 11 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 11 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 11 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 11 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 11 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 11 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 11 months ago