
Homework Answers
![Soln:- RS) E(S) cs (5+4X5+6) g) GS) = K (5+4) (StG) = -5 -6-4 2 or +90 Breakaway point: K= -($+4) 5+6) as to 7 - +6)+(5+4)] =](http://img.homeworklib.com/questions/86352f20-6f4a-11eb-aaf7-ebef01c214f7.png?x-oss-process=image/resize,w_560)



Add Answer to:
Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s +...
A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of G...
 A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
steps R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown...
 steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle...
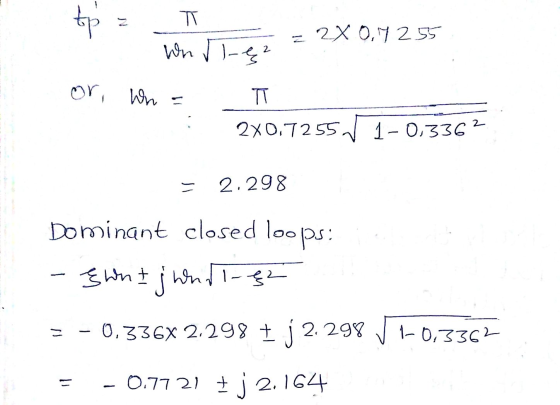
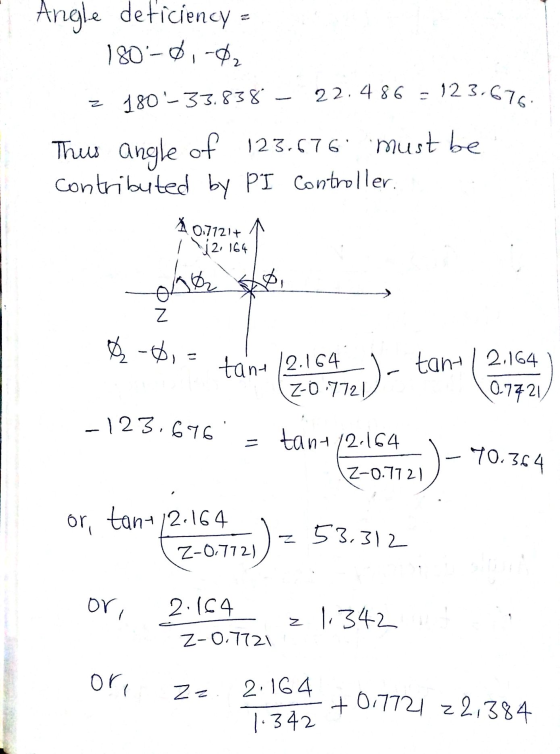
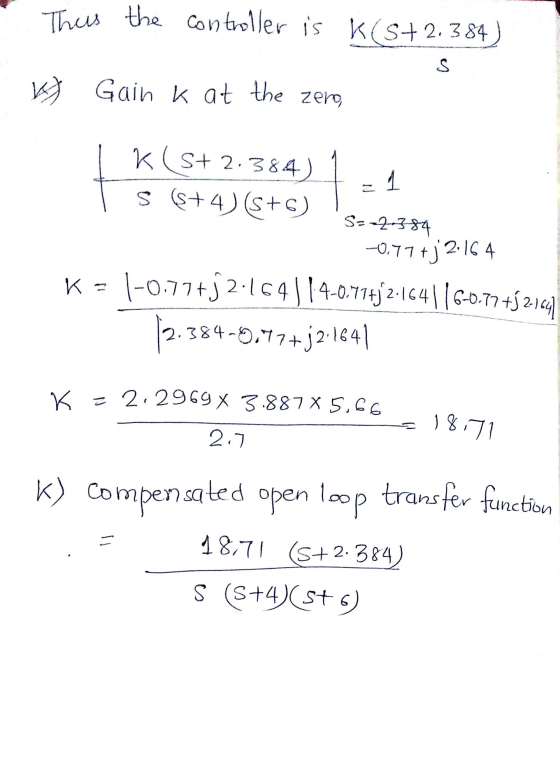
 4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a...
 4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer fun...
 Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Problem 4 Suppose we have the system shown below operating at 15% overshoot. G(s)- (G) (s +2)%s +5%s+7) Use time domain techniques to design a compensator (and find K) so the appropriate static e...
 Problem 4 Suppose we have the system shown below operating at 15% overshoot. G(s)- (G) (s +2)%s +5%s+7) Use time domain techniques to design a compensator (and find K) so the appropriate static error constant is 20 without appreciably changing the dominant poles of the uncompensated system. There can be no zero pole cancellations. Do not change the dominant poles of the system.
Problem 4 Suppose we have the system shown below operating at 15% overshoot. G(s)- (G) (s +2)%s...
Problem 4 Suppose we have the system shown below operating at 15% overshoot. G(s)- (G) (s +2)%s +5%s+7) Use time domain techniques to design a compensator (and find K) so the appropriate static error constant is 20 without appreciably changing the dominant poles of the uncompensated system. There can be no zero pole cancellations. Do not change the dominant poles of the system.
Problem 4 Suppose we have the system shown below operating at 15% overshoot. G(s)- (G) (s +2)%s...
C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s...
 C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s) - s 5)3' (a) Find the location of the dominant poles to yield a 1.2 second settling time and overshoot of 15% (b) If a compensator with a zero at-1 is used to achieve the conditions of Part a, what must be the angular contribution of the compensator pole be? (c) Find the location of the compensator pole. (d) Find the gain...
C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s) - s 5)3' (a) Find the location of the dominant poles to yield a 1.2 second settling time and overshoot of 15% (b) If a compensator with a zero at-1 is used to achieve the conditions of Part a, what must be the angular contribution of the compensator pole be? (c) Find the location of the compensator pole. (d) Find the gain...
Find the dominant poles and gain K like they did in step 1 for the uncompensated system, EXCEPT D...
 Find the dominant poles and gain
K like they did in step 1 for the uncompensated
system, EXCEPT DO IT FOR 15% OVERSHOOT (zeta = 0.517) which is
121.13 degrees.
Show all work
Example 9.5 PID Controller Design PROBLEM: Given the system of Figure 9.31, design a PID controller so that the system can operate with a peak time that is two-thirds that of the uncompensated system at 20% overshoot and with zero steady-state error for a step input. R(s)Es)...
Find the dominant poles and gain
K like they did in step 1 for the uncompensated
system, EXCEPT DO IT FOR 15% OVERSHOOT (zeta = 0.517) which is
121.13 degrees.
Show all work
Example 9.5 PID Controller Design PROBLEM: Given the system of Figure 9.31, design a PID controller so that the system can operate with a peak time that is two-thirds that of the uncompensated system at 20% overshoot and with zero steady-state error for a step input. R(s)Es)...
3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a...
 3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a unity feedback system with closed loop poles is to be 0.4, and the settling time is to be 0.5 second for the compensated system. a. b. c. d. Find the coordinates of the dominant poles. Find the location of the compensator zero if the compensator pole is at -15 (lead compensator) Find the required system gain. Compare the performance of the uncompensated and compensated...
3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a unity feedback system with closed loop poles is to be 0.4, and the settling time is to be 0.5 second for the compensated system. a. b. c. d. Find the coordinates of the dominant poles. Find the location of the compensator zero if the compensator pole is at -15 (lead compensator) Find the required system gain. Compare the performance of the uncompensated and compensated...
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root lo...
 pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
 A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
 steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
 4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
 4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
 Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
 Problem 4 Suppose we have the system shown below operating at 15% overshoot. G(s)- (G) (s +2)%s +5%s+7) Use time domain techniques to design a compensator (and find K) so the appropriate static error constant is 20 without appreciably changing the dominant poles of the uncompensated system. There can be no zero pole cancellations. Do not change the dominant poles of the system.
Problem 4 Suppose we have the system shown below operating at 15% overshoot. G(s)- (G) (s +2)%s...
Problem 4 Suppose we have the system shown below operating at 15% overshoot. G(s)- (G) (s +2)%s +5%s+7) Use time domain techniques to design a compensator (and find K) so the appropriate static error constant is 20 without appreciably changing the dominant poles of the uncompensated system. There can be no zero pole cancellations. Do not change the dominant poles of the system.
Problem 4 Suppose we have the system shown below operating at 15% overshoot. G(s)- (G) (s +2)%s...
 C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s) - s 5)3' (a) Find the location of the dominant poles to yield a 1.2 second settling time and overshoot of 15% (b) If a compensator with a zero at-1 is used to achieve the conditions of Part a, what must be the angular contribution of the compensator pole be? (c) Find the location of the compensator pole. (d) Find the gain...
C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s) - s 5)3' (a) Find the location of the dominant poles to yield a 1.2 second settling time and overshoot of 15% (b) If a compensator with a zero at-1 is used to achieve the conditions of Part a, what must be the angular contribution of the compensator pole be? (c) Find the location of the compensator pole. (d) Find the gain...
 Find the dominant poles and gain
K like they did in step 1 for the uncompensated
system, EXCEPT DO IT FOR 15% OVERSHOOT (zeta = 0.517) which is
121.13 degrees.
Show all work
Example 9.5 PID Controller Design PROBLEM: Given the system of Figure 9.31, design a PID controller so that the system can operate with a peak time that is two-thirds that of the uncompensated system at 20% overshoot and with zero steady-state error for a step input. R(s)Es)...
Find the dominant poles and gain
K like they did in step 1 for the uncompensated
system, EXCEPT DO IT FOR 15% OVERSHOOT (zeta = 0.517) which is
121.13 degrees.
Show all work
Example 9.5 PID Controller Design PROBLEM: Given the system of Figure 9.31, design a PID controller so that the system can operate with a peak time that is two-thirds that of the uncompensated system at 20% overshoot and with zero steady-state error for a step input. R(s)Es)...
 3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a unity feedback system with closed loop poles is to be 0.4, and the settling time is to be 0.5 second for the compensated system. a. b. c. d. Find the coordinates of the dominant poles. Find the location of the compensator zero if the compensator pole is at -15 (lead compensator) Find the required system gain. Compare the performance of the uncompensated and compensated...
3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a unity feedback system with closed loop poles is to be 0.4, and the settling time is to be 0.5 second for the compensated system. a. b. c. d. Find the coordinates of the dominant poles. Find the location of the compensator zero if the compensator pole is at -15 (lead compensator) Find the required system gain. Compare the performance of the uncompensated and compensated...
 pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago