 Please Justify each step of the proof.
Please Justify each step of the proof.
Homework Answers
Add Answer to:
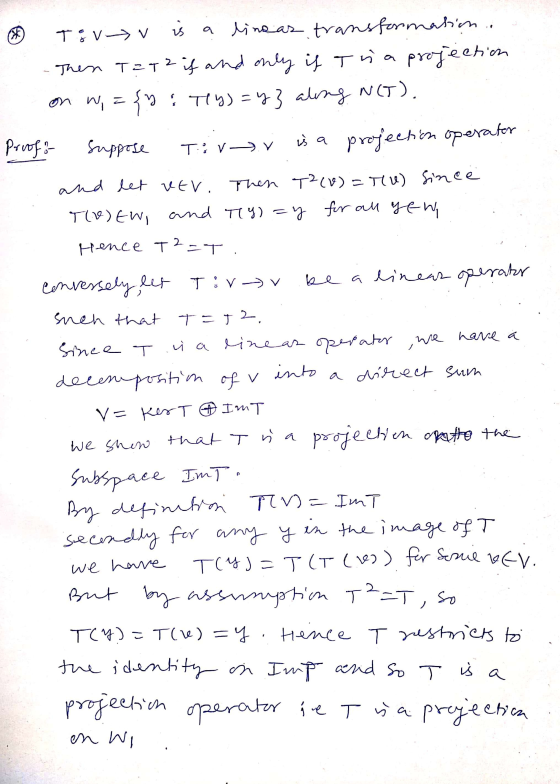
Please Justify each step of the proof.
For the definition of projection and related facts, see...
Please answer me fully with the details. Thanks! True of False? Justify yo ur answer. —D т. If {ii, .., in} is a linear...
 Please answer me fully with the details. Thanks!
True of False? Justify yo ur answer. —D т. If {ii, .., in} is a linearly independent subset of (1) Let V bea vector spacе, аnd let dim(V) V. then n < т. (2) Let V and W be vector spaces, and suppose that T : V -+ W is a linear transformation. If there are vectors i, 2, ..., Tj in V such that the vectors T(),T(T2),...,T(vj) span W, then the...
Please answer me fully with the details. Thanks!
True of False? Justify yo ur answer. —D т. If {ii, .., in} is a linearly independent subset of (1) Let V bea vector spacе, аnd let dim(V) V. then n < т. (2) Let V and W be vector spaces, and suppose that T : V -+ W is a linear transformation. If there are vectors i, 2, ..., Tj in V such that the vectors T(),T(T2),...,T(vj) span W, then the...
Let W be a subspace of an n-dimensional vector space V over C, and let T:V...
 Let W be a subspace of an n-dimensional vector space V over C, and let T:V V be a linear transformation. Prove that W is invariant under T if and only if W is invariant under T- I for any i EC.
Let W be a subspace of an n-dimensional vector space V over C, and let T:V V be a linear transformation. Prove that W is invariant under T if and only if W is invariant under T- I for any i EC.
Justify statement 1-4 and explain why. If a matrix A is invertible, then all the eigenvalues...
 Justify statement 1-4 and explain why.
If a matrix A is invertible, then all the eigenvalues of A are nonzero. If two linear maps have the same characteristic polynomial, then they always have the same Jordan canonical form. If a linear map from the vector space P of all polynomials to itself is injective, then it is an isomorphism. If W, and W2 are subspaces of a vector space V, then the projection T: W W 2 → W, i.e.,...
Justify statement 1-4 and explain why.
If a matrix A is invertible, then all the eigenvalues of A are nonzero. If two linear maps have the same characteristic polynomial, then they always have the same Jordan canonical form. If a linear map from the vector space P of all polynomials to itself is injective, then it is an isomorphism. If W, and W2 are subspaces of a vector space V, then the projection T: W W 2 → W, i.e.,...
3. In the following question, we are going to prove that ker(T) = { } if...
 3. In the following question, we are going to prove that ker(T) = { } if and only if T is one-to- one. (Writing prove is like writing a little essay, with some good logical connection between each sentence.) (a) Let T:V - W a linear transformation between two vector spaces. Suppose ker(T)={0}. Show that T is one-to-one. (Hint: proof by contradiction, by assuming both ker(T)=ð and T is not one-to-one. Now, apply definition of kernel and one-to-one, what is...
3. In the following question, we are going to prove that ker(T) = { } if and only if T is one-to- one. (Writing prove is like writing a little essay, with some good logical connection between each sentence.) (a) Let T:V - W a linear transformation between two vector spaces. Suppose ker(T)={0}. Show that T is one-to-one. (Hint: proof by contradiction, by assuming both ker(T)=ð and T is not one-to-one. Now, apply definition of kernel and one-to-one, what is...
please help me with questions 1,2,3 1. Let V be a 2-dimensional vector space with basis...
 please help me with questions 1,2,3
1. Let V be a 2-dimensional vector space with basis X = {v1, v2}, write down the matrices [0]xx and [id]xx. 2. Let U, V, W be vector spaces and S:U +V, T:V + W be linear transforma- tions. Define the composition TOS:U + W by To S(u) = T(S(u)) for all u in U. a. Show that ToS is a linear transformation. b. Now suppose U is 1-dimensional with basis X {41}, V...
please help me with questions 1,2,3
1. Let V be a 2-dimensional vector space with basis X = {v1, v2}, write down the matrices [0]xx and [id]xx. 2. Let U, V, W be vector spaces and S:U +V, T:V + W be linear transforma- tions. Define the composition TOS:U + W by To S(u) = T(S(u)) for all u in U. a. Show that ToS is a linear transformation. b. Now suppose U is 1-dimensional with basis X {41}, V...
(1) (Definition and short answer — no justification needed) (a) Let f:R → R", and let...
 (1) (Definition and short answer — no justification needed) (a) Let f:R → R", and let p ER". Define carefully what it means for the function f to be differentiable at p. (b) Given a linear transformation T : R" + R", explain briefly how to form its representing matrix (T). If you know the matrix (T), how can you compute T(v) for a vector v € R"? 1 and let S be the linear (c) Let T be the...
(1) (Definition and short answer — no justification needed) (a) Let f:R → R", and let p ER". Define carefully what it means for the function f to be differentiable at p. (b) Given a linear transformation T : R" + R", explain briefly how to form its representing matrix (T). If you know the matrix (T), how can you compute T(v) for a vector v € R"? 1 and let S be the linear (c) Let T be the...
7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e....
 7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e. V = span(B). Consider the linear transformation T:V + V defined by T(f(t)) = f"(t) – 2f'(t) – f(t). Find the standard matrix of the transformation. (Hint: Associate sin(t) with the vector (0), and so forth.) 8. Show that B = {t2 – 2, 3t2 +t, t+t+8} is a basis for P2, and find the change of coordinates matrix P which goes from B...
7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e. V = span(B). Consider the linear transformation T:V + V defined by T(f(t)) = f"(t) – 2f'(t) – f(t). Find the standard matrix of the transformation. (Hint: Associate sin(t) with the vector (0), and so forth.) 8. Show that B = {t2 – 2, 3t2 +t, t+t+8} is a basis for P2, and find the change of coordinates matrix P which goes from B...
8. (10 Pts) Answer by True / False and justify your answer. (a) Let A be...
 8. (10 Pts) Answer by True / False and justify your answer. (a) Let A be a 2 × 2 matrix such that(A2-Nthen, if A ±1 A--. (b) If C is a skew-symmetric matrix of odd order n, then |C-0 (c) If A is a square matrix, and the linear transformation L(z) Az is one-to-one, then the linear transformation x ? At is also one-toone. z), ? O (z, y, z) = (az, ay, 0), then V is not a...
8. (10 Pts) Answer by True / False and justify your answer. (a) Let A be a 2 × 2 matrix such that(A2-Nthen, if A ±1 A--. (b) If C is a skew-symmetric matrix of odd order n, then |C-0 (c) If A is a square matrix, and the linear transformation L(z) Az is one-to-one, then the linear transformation x ? At is also one-toone. z), ? O (z, y, z) = (az, ay, 0), then V is not a...
Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that...
 Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
Q10 10 Points Please answer the below questions. Q10.1 4 Points Let m, n EN\{1}, V...
 Q10 10 Points Please answer the below questions. Q10.1 4 Points Let m, n EN\{1}, V be a vector space over R of dimension n and (v1,..., Vm) be an m tuple of V. (Select ALL that are TRUE) If m > n then (v1, ..., Vy) spans V. If (01,..., Vm) is linearly independent then m <n. (V1,..., Um) is linearly dependent if and only if for all i = 1,..., m we have that Vi Espan(v1,..., Vi-1, Vi+1,...,...
Q10 10 Points Please answer the below questions. Q10.1 4 Points Let m, n EN\{1}, V be a vector space over R of dimension n and (v1,..., Vm) be an m tuple of V. (Select ALL that are TRUE) If m > n then (v1, ..., Vy) spans V. If (01,..., Vm) is linearly independent then m <n. (V1,..., Um) is linearly dependent if and only if for all i = 1,..., m we have that Vi Espan(v1,..., Vi-1, Vi+1,...,...
 Please answer me fully with the details. Thanks!
True of False? Justify yo ur answer. —D т. If {ii, .., in} is a linearly independent subset of (1) Let V bea vector spacе, аnd let dim(V) V. then n < т. (2) Let V and W be vector spaces, and suppose that T : V -+ W is a linear transformation. If there are vectors i, 2, ..., Tj in V such that the vectors T(),T(T2),...,T(vj) span W, then the...
Please answer me fully with the details. Thanks!
True of False? Justify yo ur answer. —D т. If {ii, .., in} is a linearly independent subset of (1) Let V bea vector spacе, аnd let dim(V) V. then n < т. (2) Let V and W be vector spaces, and suppose that T : V -+ W is a linear transformation. If there are vectors i, 2, ..., Tj in V such that the vectors T(),T(T2),...,T(vj) span W, then the...
 Let W be a subspace of an n-dimensional vector space V over C, and let T:V V be a linear transformation. Prove that W is invariant under T if and only if W is invariant under T- I for any i EC.
Let W be a subspace of an n-dimensional vector space V over C, and let T:V V be a linear transformation. Prove that W is invariant under T if and only if W is invariant under T- I for any i EC.
 Justify statement 1-4 and explain why.
If a matrix A is invertible, then all the eigenvalues of A are nonzero. If two linear maps have the same characteristic polynomial, then they always have the same Jordan canonical form. If a linear map from the vector space P of all polynomials to itself is injective, then it is an isomorphism. If W, and W2 are subspaces of a vector space V, then the projection T: W W 2 → W, i.e.,...
Justify statement 1-4 and explain why.
If a matrix A is invertible, then all the eigenvalues of A are nonzero. If two linear maps have the same characteristic polynomial, then they always have the same Jordan canonical form. If a linear map from the vector space P of all polynomials to itself is injective, then it is an isomorphism. If W, and W2 are subspaces of a vector space V, then the projection T: W W 2 → W, i.e.,...
 3. In the following question, we are going to prove that ker(T) = { } if and only if T is one-to- one. (Writing prove is like writing a little essay, with some good logical connection between each sentence.) (a) Let T:V - W a linear transformation between two vector spaces. Suppose ker(T)={0}. Show that T is one-to-one. (Hint: proof by contradiction, by assuming both ker(T)=ð and T is not one-to-one. Now, apply definition of kernel and one-to-one, what is...
3. In the following question, we are going to prove that ker(T) = { } if and only if T is one-to- one. (Writing prove is like writing a little essay, with some good logical connection between each sentence.) (a) Let T:V - W a linear transformation between two vector spaces. Suppose ker(T)={0}. Show that T is one-to-one. (Hint: proof by contradiction, by assuming both ker(T)=ð and T is not one-to-one. Now, apply definition of kernel and one-to-one, what is...
 please help me with questions 1,2,3
1. Let V be a 2-dimensional vector space with basis X = {v1, v2}, write down the matrices [0]xx and [id]xx. 2. Let U, V, W be vector spaces and S:U +V, T:V + W be linear transforma- tions. Define the composition TOS:U + W by To S(u) = T(S(u)) for all u in U. a. Show that ToS is a linear transformation. b. Now suppose U is 1-dimensional with basis X {41}, V...
please help me with questions 1,2,3
1. Let V be a 2-dimensional vector space with basis X = {v1, v2}, write down the matrices [0]xx and [id]xx. 2. Let U, V, W be vector spaces and S:U +V, T:V + W be linear transforma- tions. Define the composition TOS:U + W by To S(u) = T(S(u)) for all u in U. a. Show that ToS is a linear transformation. b. Now suppose U is 1-dimensional with basis X {41}, V...
 (1) (Definition and short answer — no justification needed) (a) Let f:R → R", and let p ER". Define carefully what it means for the function f to be differentiable at p. (b) Given a linear transformation T : R" + R", explain briefly how to form its representing matrix (T). If you know the matrix (T), how can you compute T(v) for a vector v € R"? 1 and let S be the linear (c) Let T be the...
(1) (Definition and short answer — no justification needed) (a) Let f:R → R", and let p ER". Define carefully what it means for the function f to be differentiable at p. (b) Given a linear transformation T : R" + R", explain briefly how to form its representing matrix (T). If you know the matrix (T), how can you compute T(v) for a vector v € R"? 1 and let S be the linear (c) Let T be the...
 7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e. V = span(B). Consider the linear transformation T:V + V defined by T(f(t)) = f"(t) – 2f'(t) – f(t). Find the standard matrix of the transformation. (Hint: Associate sin(t) with the vector (0), and so forth.) 8. Show that B = {t2 – 2, 3t2 +t, t+t+8} is a basis for P2, and find the change of coordinates matrix P which goes from B...
7. Let V be the space generated by the basis B = {sin(t), cos(t), et}. i.e. V = span(B). Consider the linear transformation T:V + V defined by T(f(t)) = f"(t) – 2f'(t) – f(t). Find the standard matrix of the transformation. (Hint: Associate sin(t) with the vector (0), and so forth.) 8. Show that B = {t2 – 2, 3t2 +t, t+t+8} is a basis for P2, and find the change of coordinates matrix P which goes from B...
 8. (10 Pts) Answer by True / False and justify your answer. (a) Let A be a 2 × 2 matrix such that(A2-Nthen, if A ±1 A--. (b) If C is a skew-symmetric matrix of odd order n, then |C-0 (c) If A is a square matrix, and the linear transformation L(z) Az is one-to-one, then the linear transformation x ? At is also one-toone. z), ? O (z, y, z) = (az, ay, 0), then V is not a...
8. (10 Pts) Answer by True / False and justify your answer. (a) Let A be a 2 × 2 matrix such that(A2-Nthen, if A ±1 A--. (b) If C is a skew-symmetric matrix of odd order n, then |C-0 (c) If A is a square matrix, and the linear transformation L(z) Az is one-to-one, then the linear transformation x ? At is also one-toone. z), ? O (z, y, z) = (az, ay, 0), then V is not a...
 Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
Problem 3. (1) Let H be a Hilbert space and S, TE B(HH). Then, prove that ||ST|| ||||||||| (2) Let X, Y be Hilbert spaces and Te B(X,Y). Then, prove that ||1||| sup ||T3|1 TEX=1 Let X, Y be Banach spaces. Definition (review) We denote by B(X, Y) a set of all bounded linear operators T:X + Y with D(T) = X. B(X, Y) is a vector space. Definition (review) A linear operator T:X + Y is said to be...
 Q10 10 Points Please answer the below questions. Q10.1 4 Points Let m, n EN\{1}, V be a vector space over R of dimension n and (v1,..., Vm) be an m tuple of V. (Select ALL that are TRUE) If m > n then (v1, ..., Vy) spans V. If (01,..., Vm) is linearly independent then m <n. (V1,..., Um) is linearly dependent if and only if for all i = 1,..., m we have that Vi Espan(v1,..., Vi-1, Vi+1,...,...
Q10 10 Points Please answer the below questions. Q10.1 4 Points Let m, n EN\{1}, V be a vector space over R of dimension n and (v1,..., Vm) be an m tuple of V. (Select ALL that are TRUE) If m > n then (v1, ..., Vy) spans V. If (01,..., Vm) is linearly independent then m <n. (V1,..., Um) is linearly dependent if and only if for all i = 1,..., m we have that Vi Espan(v1,..., Vi-1, Vi+1,...,...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago