Consider the following transfer function of a linear control system

1- Determine the state feedback gain matrix that places the closed system at s=-32, -3.234 ± j3.3.
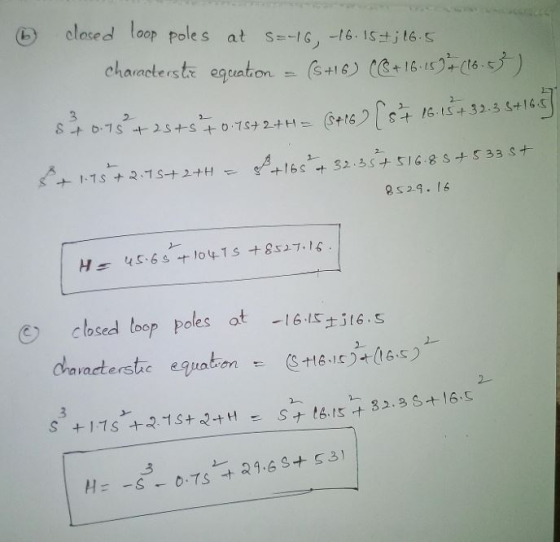
2- Design a full order observer which produces a set of desired closed loop poles at s=-16, -16.15±j16.5
3-Assume X1 is measurable, design a reduced order observer with desired closed loop poles at -16.15±j16.5

1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a) Determine the state feedback gain matrix that places the closed system poles at s- -32, -3.234+j3.3. (b) Design a full order observer which produces a set of desired closed loop poles at s=-16,-16.15 ± j16.5 | (c) Assurmex, is measurable, design a reduced order observer with desired closed loop poles at-16.15 ±j165.
Homework Answers

Add Answer to:
Consider the following transfer function of a linear control system 1- Determine the state feedb...
Consider the following transfer function of a linear control system Determine the state feedba...
 Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
3. The transfer function of a control system is given as G(s) = (s+1)(s+2)(s45) (a) Determine a state variable representation in observer canonical form. (b) Design a full order observer of the syste...
 3. The transfer function of a control system is given as G(s) = (s+1)(s+2)(s45) (a) Determine a state variable representation in observer canonical form. (b) Design a full order observer of the system. Let the poles of the observer be 10 times faster than the system poles. Show the observer gain matrix. (c) Determine and plot the errors responses between the estimated output and the actual output. (d) Determine and plot the estimated state variables and determine their settling times....
3. The transfer function of a control system is given as G(s) = (s+1)(s+2)(s45) (a) Determine a state variable representation in observer canonical form. (b) Design a full order observer of the system. Let the poles of the observer be 10 times faster than the system poles. Show the observer gain matrix. (c) Determine and plot the errors responses between the estimated output and the actual output. (d) Determine and plot the estimated state variables and determine their settling times....
1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of...
 1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of SCR based on NOx sensor feedback measured at the outlet of the SCR. Based on the paper by Upadhyay and Nieuwstadt [1], a single cell model of SCR can be described by the following state space model: * = A x + Bu y = C x Where x = [Cno Cnuz] A = [-0.25 0.08 0.35 -0.1 [ 0 0.03 01 0.05); B...
1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of SCR based on NOx sensor feedback measured at the outlet of the SCR. Based on the paper by Upadhyay and Nieuwstadt [1], a single cell model of SCR can be described by the following state space model: * = A x + Bu y = C x Where x = [Cno Cnuz] A = [-0.25 0.08 0.35 -0.1 [ 0 0.03 01 0.05); B...
14. Consider the solar tracking servo with the following transfer function G,(s) = s(10s +1) G...
 14. Consider the solar tracking servo with the following transfer function G,(s) = s(10s +1) G (5) U(s) X (s) X (s) Y(s) a. Draw the well labelled block diagram of a full state feedback digital control system with a closed loop observer and a reference. b. Design a full state digital feedback controller to place the system poles at R2--1+) by employing the feedback law from state space technique.
14. Consider the solar tracking servo with the following transfer function G,(s) = s(10s +1) G (5) U(s) X (s) X (s) Y(s) a. Draw the well labelled block diagram of a full state feedback digital control system with a closed loop observer and a reference. b. Design a full state digital feedback controller to place the system poles at R2--1+) by employing the feedback law from state space technique.
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function...
 7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
CP11.11 Consider the third-order svstem 0 4.3 -1.7 6.7 0.35 У-10 I 01x (a) Using the acker function, determine a full-s...
 CP11.11 Consider the third-order svstem 0 4.3 -1.7 6.7 0.35 У-10 I 01x (a) Using the acker function, determine a full-state feedback gain matrix and an observer gain matrix to place the closed-loop system poles at si21.4 tj1.4, s3 -2 and the observer poles at s1,2 18 j5, s3 - -20. (b) Construct the state variable compensator using Figure 11.1 as a guide. (c) Simulate the closed-loop system with the state initial conditions x(0)=(1 0 0)' and initial state estimate...
CP11.11 Consider the third-order svstem 0 4.3 -1.7 6.7 0.35 У-10 I 01x (a) Using the acker function, determine a full-state feedback gain matrix and an observer gain matrix to place the closed-loop system poles at si21.4 tj1.4, s3 -2 and the observer poles at s1,2 18 j5, s3 - -20. (b) Construct the state variable compensator using Figure 11.1 as a guide. (c) Simulate the closed-loop system with the state initial conditions x(0)=(1 0 0)' and initial state estimate...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a...
 - 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space...
 Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for desired eigenvalues of -10.-20 and-30. What are the values of the estimator gain matrix?
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for...
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for desired eigenvalues of -10.-20 and-30. What are the values of the estimator gain matrix?
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for...
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead c...
 1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measur...
 control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
 Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
 3. The transfer function of a control system is given as G(s) = (s+1)(s+2)(s45) (a) Determine a state variable representation in observer canonical form. (b) Design a full order observer of the system. Let the poles of the observer be 10 times faster than the system poles. Show the observer gain matrix. (c) Determine and plot the errors responses between the estimated output and the actual output. (d) Determine and plot the estimated state variables and determine their settling times....
3. The transfer function of a control system is given as G(s) = (s+1)(s+2)(s45) (a) Determine a state variable representation in observer canonical form. (b) Design a full order observer of the system. Let the poles of the observer be 10 times faster than the system poles. Show the observer gain matrix. (c) Determine and plot the errors responses between the estimated output and the actual output. (d) Determine and plot the estimated state variables and determine their settling times....
 1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of SCR based on NOx sensor feedback measured at the outlet of the SCR. Based on the paper by Upadhyay and Nieuwstadt [1], a single cell model of SCR can be described by the following state space model: * = A x + Bu y = C x Where x = [Cno Cnuz] A = [-0.25 0.08 0.35 -0.1 [ 0 0.03 01 0.05); B...
1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of SCR based on NOx sensor feedback measured at the outlet of the SCR. Based on the paper by Upadhyay and Nieuwstadt [1], a single cell model of SCR can be described by the following state space model: * = A x + Bu y = C x Where x = [Cno Cnuz] A = [-0.25 0.08 0.35 -0.1 [ 0 0.03 01 0.05); B...
 14. Consider the solar tracking servo with the following transfer function G,(s) = s(10s +1) G (5) U(s) X (s) X (s) Y(s) a. Draw the well labelled block diagram of a full state feedback digital control system with a closed loop observer and a reference. b. Design a full state digital feedback controller to place the system poles at R2--1+) by employing the feedback law from state space technique.
14. Consider the solar tracking servo with the following transfer function G,(s) = s(10s +1) G (5) U(s) X (s) X (s) Y(s) a. Draw the well labelled block diagram of a full state feedback digital control system with a closed loop observer and a reference. b. Design a full state digital feedback controller to place the system poles at R2--1+) by employing the feedback law from state space technique.
 7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
 CP11.11 Consider the third-order svstem 0 4.3 -1.7 6.7 0.35 У-10 I 01x (a) Using the acker function, determine a full-state feedback gain matrix and an observer gain matrix to place the closed-loop system poles at si21.4 tj1.4, s3 -2 and the observer poles at s1,2 18 j5, s3 - -20. (b) Construct the state variable compensator using Figure 11.1 as a guide. (c) Simulate the closed-loop system with the state initial conditions x(0)=(1 0 0)' and initial state estimate...
CP11.11 Consider the third-order svstem 0 4.3 -1.7 6.7 0.35 У-10 I 01x (a) Using the acker function, determine a full-state feedback gain matrix and an observer gain matrix to place the closed-loop system poles at si21.4 tj1.4, s3 -2 and the observer poles at s1,2 18 j5, s3 - -20. (b) Construct the state variable compensator using Figure 11.1 as a guide. (c) Simulate the closed-loop system with the state initial conditions x(0)=(1 0 0)' and initial state estimate...
 - 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
 Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for desired eigenvalues of -10.-20 and-30. What are the values of the estimator gain matrix?
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for...
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for desired eigenvalues of -10.-20 and-30. What are the values of the estimator gain matrix?
Consider a single input, single output system with transfer function 10 H(s)- s+10s +25s +100 Obtain a state-space model in observer canonical form for the system, and design a full state estimator for...
 1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such that the desired closed-loop poles at -2+2j following steps: J, by completing the (a) Find the angle deficiency from the compensator, (b)Find the zero and poles of the compensator (c) Find constant gain Kc.
1. Given a unity feedback system with the open-loop transfer function s(0.5s +1) .design a lead compensator ,0 〈 α 〈 1, such...
 control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago