
Homework Answers
pls find enclosed pictures for answer

Add Answer to:
R (input) + Y (output) G(s) Given the above system, where G(s)(6t21s+ Write a Matlab program to perform the following: . Read the numerator coefficient array s(s+b)(s+c) Read the dominator coeffic...
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r)...
 Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+59) controller plant 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+59) controller plant 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r)...
 Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(3+2)(s+5 ) controller plant + 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(3+2)(s+5 ) controller plant + 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Write a MATLAB program that w design a PD compensator assuming second-order approximations as fol...
 Write a MATLAB program that w design a PD compensator assuming second-order approximations as follows. . Allow the user to input the desired percent overshoot, peak time and gain required to meet a steady-state error specification Display the gain-compensated Bode plot . Calculate the required phase margin and bandwidth. . Display the pole, zero, and gain of the PD compensator. Display the compensated Bode plot ·Output the step response of the PD-compensated system to test your second-order approximation. [Implement your...
Write a MATLAB program that w design a PD compensator assuming second-order approximations as follows. . Allow the user to input the desired percent overshoot, peak time and gain required to meet a steady-state error specification Display the gain-compensated Bode plot . Calculate the required phase margin and bandwidth. . Display the pole, zero, and gain of the PD compensator. Display the compensated Bode plot ·Output the step response of the PD-compensated system to test your second-order approximation. [Implement your...
We want to control output(y) using PID control in Kds2+KpS+Ki C(s) S Input(r) is a magnitude1...
 We want to control output(y) using PID control in Kds2+KpS+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+5) controller plant Y C(s) P(s) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
We want to control output(y) using PID control in Kds2+KpS+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+5) controller plant Y C(s) P(s) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e()...
 Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Python DESCRIPTION Write a program that will read an array of integers from a file and...
Python DESCRIPTION Write a program that will read an array of integers from a file and do the following: ● Task 1: Revert the array in N/2 complexity time (i.e., number of steps) . ● Task 2: Find the maximum and minimum element of the array. INPUT OUTPUT Read the array of integers from a file named “ inputHW1.txt ”. To do this, you can use code snippet from the “ file.py ” file. This file is provided in Canvas....
please solve as matlab code. The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C...
 please solve as matlab code.
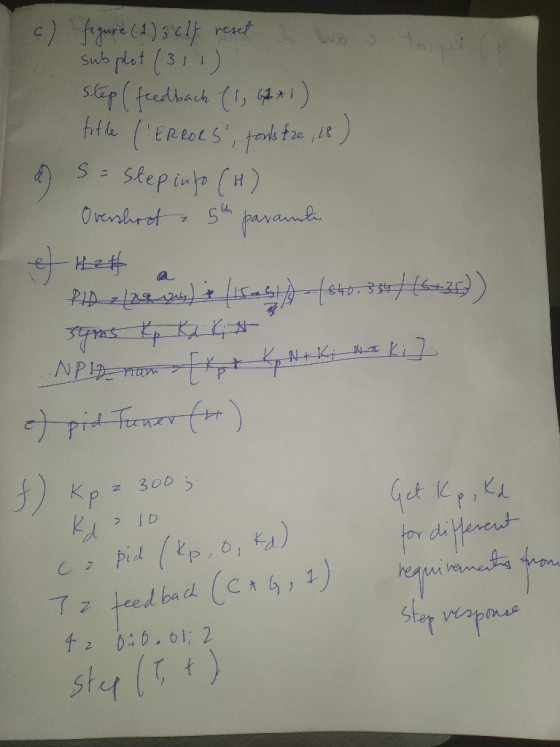
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
Consider a negative feedback system whose open-loop transfer function is: G(s)H(s)=K/(s(s+1)) Write a MATLAB program to...
Consider a negative feedback system whose open-loop transfer function is: G(s)H(s)=K/(s(s+1)) Write a MATLAB program to obtain the root-locus plot of G(s)H(s). [2 marks] What are the locations of poles when K = 0.19. [2 marks] When K = 0.4, what are the locations of poles? [3 marks] Find values of the damping ratio, % overshoot and frequency when K = 0.4. [3 marks] Write a MATLAB program to obtain a bode plot of G(s)H(s) when K = 1. [2...
Write as MATLAB code with comments thank you. The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0...
 Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
A system with input r(t) and output y(t) has transfer function G(s) = 10 (s +...
A system with input r(t) and output y(t) has transfer function G(s) = 10 (s + 1)(s + 2). Find y(t) for t ≥ 0 if the following inputs are applied (with zero initial conditions): (a) r(t) = u(t) (b) r(t) = e^ −t*u(t)
 Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+59) controller plant 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+59) controller plant 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
 Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(3+2)(s+5 ) controller plant + 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
Using MATLAB. We want to control output(y) using PID control in Kds? +Kps+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(3+2)(s+5 ) controller plant + 14 y C(s) P(S) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
 Write a MATLAB program that w design a PD compensator assuming second-order approximations as follows. . Allow the user to input the desired percent overshoot, peak time and gain required to meet a steady-state error specification Display the gain-compensated Bode plot . Calculate the required phase margin and bandwidth. . Display the pole, zero, and gain of the PD compensator. Display the compensated Bode plot ·Output the step response of the PD-compensated system to test your second-order approximation. [Implement your...
Write a MATLAB program that w design a PD compensator assuming second-order approximations as follows. . Allow the user to input the desired percent overshoot, peak time and gain required to meet a steady-state error specification Display the gain-compensated Bode plot . Calculate the required phase margin and bandwidth. . Display the pole, zero, and gain of the PD compensator. Display the compensated Bode plot ·Output the step response of the PD-compensated system to test your second-order approximation. [Implement your...
 We want to control output(y) using PID control in Kds2+KpS+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+5) controller plant Y C(s) P(s) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
We want to control output(y) using PID control in Kds2+KpS+Ki C(s) S Input(r) is a magnitude1 step. Plant is given by 1 (s+1)(s+2)(s+5) controller plant Y C(s) P(s) a) Calculate Closed Loop characteristics and steady-state error(unity feedback and Kp=1, Kd=1, Ki=0)) 2.Using automatic PID tuning function, reduce steady-state error=0 and report Kp=?, Kd=? And Ki=?
 Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
 please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
 Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago