
this needs to be done in Matlab and I cannot figure out the code for this transfer function in Matlab.
Homework Answers



Add Answer to:
this needs to be done in Matlab and I cannot figure
out the code for this...
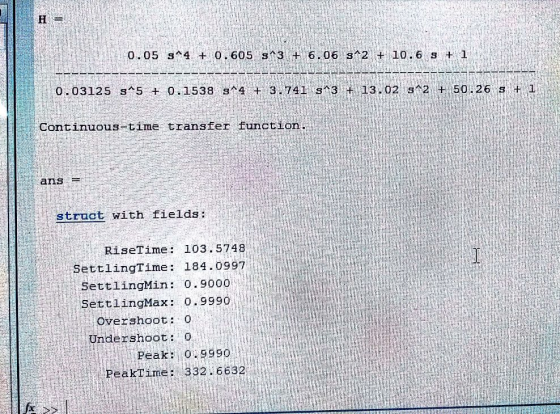
2. You are given the motor whose transfer function is shown in Figure 2(a). s) e(s) Amplifier Mot...
 Control system
2. You are given the motor whose transfer function is shown in Figure 2(a). s) e(s) Amplifier Motor C(s) 15 Tachometer Кр Figure 2 a) If this motor were the forward transfer function of a unity feedback system, calculate the percent overshoot and settling time that could be expected. b) You want to improve the closed-loop response. Since the motor constants cannot be changed and you cannot use a different motor, an amplifier and tachometer are inserted into...
Control system
2. You are given the motor whose transfer function is shown in Figure 2(a). s) e(s) Amplifier Motor C(s) 15 Tachometer Кр Figure 2 a) If this motor were the forward transfer function of a unity feedback system, calculate the percent overshoot and settling time that could be expected. b) You want to improve the closed-loop response. Since the motor constants cannot be changed and you cannot use a different motor, an amplifier and tachometer are inserted into...
PLEASE USE MATLAB TO ANSWER ALL OF THE PARTS. PROVIDE MATLAB CODE FOR EACH OF THE...
 PLEASE USE MATLAB TO ANSWER ALL OF THE
PARTS.
PROVIDE MATLAB CODE FOR EACH OF THE PART.
PUT THE ANSWER IN A BOX.
Consider the unity feedback system depicted in Figure 1 G(s) R(s) 50K s(s + a) Figure 1 1. Determine the system's closed loop transfer function. 2. Plot the system's step response for K=10 and: • a= 2 • a=5 • a= 10 3. What happens to the system's response as a increases? Justify your answer. 4. In...
PLEASE USE MATLAB TO ANSWER ALL OF THE
PARTS.
PROVIDE MATLAB CODE FOR EACH OF THE PART.
PUT THE ANSWER IN A BOX.
Consider the unity feedback system depicted in Figure 1 G(s) R(s) 50K s(s + a) Figure 1 1. Determine the system's closed loop transfer function. 2. Plot the system's step response for K=10 and: • a= 2 • a=5 • a= 10 3. What happens to the system's response as a increases? Justify your answer. 4. In...
please solve as matlab code. The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C...
 please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MAT...
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
Matlab control
 The open-loop system dynamics model for the NASA eight-axis Advanced Research Manipulator II (ARM II) electromechanical shoulder joint/link, actuated by an armature-controlled dc servomotor is shown in Figure P1.The ARM II shoulder joint constant parameters areKa= 12, L=0.006 H, R= 1.4 Ω, Kb= 0.00867, n=200, Km= 4.375, J=Jm+ JL /n2, D=Dm+DL /n2, JL= 1, DL= 0.5, Jm= 0.00844, and Dm= 0.00013.FIGURE P1 Open-loop model for ARM ll(Due to 29/8/2020)a. Obtain the equivalent open-loop transfer function, ?(?) (with a unity feedback...
The open-loop system dynamics model for the NASA eight-axis Advanced Research Manipulator II (ARM II) electromechanical shoulder joint/link, actuated by an armature-controlled dc servomotor is shown in Figure P1.The ARM II shoulder joint constant parameters areKa= 12, L=0.006 H, R= 1.4 Ω, Kb= 0.00867, n=200, Km= 4.375, J=Jm+ JL /n2, D=Dm+DL /n2, JL= 1, DL= 0.5, Jm= 0.00844, and Dm= 0.00013.FIGURE P1 Open-loop model for ARM ll(Due to 29/8/2020)a. Obtain the equivalent open-loop transfer function, ?(?) (with a unity feedback...
Write as MATLAB code with comments thank you. The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0...
 Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
(b) The unity feedback system is given as in Figure Q3 (b). (i) Determine the closed...
 (b) The unity feedback system is given as in Figure Q3 (b). (i) Determine the closed loop transfer function of the system. (2 marks) 2 CONFIDENTIAL CONFIDENTIAL BEJ 20503/BEH 30603/BEF33003 (ii) Calculate the damping ratio š, peak time Tp, rise time Tr, percentage of overshoot%\ls and settling time Ts (5% criterion) of the system. (11 marks) Investigate the characteristic of the system response. (1 marks) (iii) R(s)+ E(s) C(s) 25 s(s + 6) Figure Q3(b)
(b) The unity feedback system is given as in Figure Q3 (b). (i) Determine the closed loop transfer function of the system. (2 marks) 2 CONFIDENTIAL CONFIDENTIAL BEJ 20503/BEH 30603/BEF33003 (ii) Calculate the damping ratio š, peak time Tp, rise time Tr, percentage of overshoot%\ls and settling time Ts (5% criterion) of the system. (11 marks) Investigate the characteristic of the system response. (1 marks) (iii) R(s)+ E(s) C(s) 25 s(s + 6) Figure Q3(b)
It has to be answered using matlab and other programs as each section says
The open-loop system dynamics model for the NASA eight-axis Advanced Research Manipulator II (ARM II) electromechanical shoulder joint/link, actuated by an armature-controlled dc servomotor is shown in Figure P1.The ARM II shoulder joint constant parameters areKa= 12, L=0.006 H, R= 1.4 Ω, Kb= 0.00867, n=200, Km= 4.375, J=Jm+ JL /n2, D=Dm+DL /n2, JL= 1, DL= 0.5, Jm= 0.00844, and Dm= 0.00013.FIGURE P1 Open-loop model for ARM ll(Due to 29/8/2020)a. Obtain the equivalent open-loop transfer function, ?(?) (with a unity feedback...
Problem 2. Using the LTI Viewer tool in MATLAB, find the peak response, percent overshoot, settling...
 Problem 2. Using the LTI Viewer tool in MATLAB, find the peak response, percent overshoot, settling time, rise time, and steady state of the step response of the system given with the closed loop transfer function: a) G(s)- (s + 3)(s2 + 3s + 20) , 12 b) G(s) = s +3s2+5s +5 3s2+5s+5 Hint: Type "ltiview" in command window of the MATLAB)
Problem 2. Using the LTI Viewer tool in MATLAB, find the peak response, percent overshoot, settling time, rise time, and steady state of the step response of the system given with the closed loop transfer function: a) G(s)- (s + 3)(s2 + 3s + 20) , 12 b) G(s) = s +3s2+5s +5 3s2+5s+5 Hint: Type "ltiview" in command window of the MATLAB)
 Control system
2. You are given the motor whose transfer function is shown in Figure 2(a). s) e(s) Amplifier Motor C(s) 15 Tachometer Кр Figure 2 a) If this motor were the forward transfer function of a unity feedback system, calculate the percent overshoot and settling time that could be expected. b) You want to improve the closed-loop response. Since the motor constants cannot be changed and you cannot use a different motor, an amplifier and tachometer are inserted into...
Control system
2. You are given the motor whose transfer function is shown in Figure 2(a). s) e(s) Amplifier Motor C(s) 15 Tachometer Кр Figure 2 a) If this motor were the forward transfer function of a unity feedback system, calculate the percent overshoot and settling time that could be expected. b) You want to improve the closed-loop response. Since the motor constants cannot be changed and you cannot use a different motor, an amplifier and tachometer are inserted into...
 PLEASE USE MATLAB TO ANSWER ALL OF THE
PARTS.
PROVIDE MATLAB CODE FOR EACH OF THE PART.
PUT THE ANSWER IN A BOX.
Consider the unity feedback system depicted in Figure 1 G(s) R(s) 50K s(s + a) Figure 1 1. Determine the system's closed loop transfer function. 2. Plot the system's step response for K=10 and: • a= 2 • a=5 • a= 10 3. What happens to the system's response as a increases? Justify your answer. 4. In...
PLEASE USE MATLAB TO ANSWER ALL OF THE
PARTS.
PROVIDE MATLAB CODE FOR EACH OF THE PART.
PUT THE ANSWER IN A BOX.
Consider the unity feedback system depicted in Figure 1 G(s) R(s) 50K s(s + a) Figure 1 1. Determine the system's closed loop transfer function. 2. Plot the system's step response for K=10 and: • a= 2 • a=5 • a= 10 3. What happens to the system's response as a increases? Justify your answer. 4. In...
 please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
please solve as matlab code.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0. 5% and the settling time with a 2% error should be T, 2 seconds (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b) Create the graph...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
 Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
 (b) The unity feedback system is given as in Figure Q3 (b). (i) Determine the closed loop transfer function of the system. (2 marks) 2 CONFIDENTIAL CONFIDENTIAL BEJ 20503/BEH 30603/BEF33003 (ii) Calculate the damping ratio š, peak time Tp, rise time Tr, percentage of overshoot%\ls and settling time Ts (5% criterion) of the system. (11 marks) Investigate the characteristic of the system response. (1 marks) (iii) R(s)+ E(s) C(s) 25 s(s + 6) Figure Q3(b)
(b) The unity feedback system is given as in Figure Q3 (b). (i) Determine the closed loop transfer function of the system. (2 marks) 2 CONFIDENTIAL CONFIDENTIAL BEJ 20503/BEH 30603/BEF33003 (ii) Calculate the damping ratio š, peak time Tp, rise time Tr, percentage of overshoot%\ls and settling time Ts (5% criterion) of the system. (11 marks) Investigate the characteristic of the system response. (1 marks) (iii) R(s)+ E(s) C(s) 25 s(s + 6) Figure Q3(b)
 Problem 2. Using the LTI Viewer tool in MATLAB, find the peak response, percent overshoot, settling time, rise time, and steady state of the step response of the system given with the closed loop transfer function: a) G(s)- (s + 3)(s2 + 3s + 20) , 12 b) G(s) = s +3s2+5s +5 3s2+5s+5 Hint: Type "ltiview" in command window of the MATLAB)
Problem 2. Using the LTI Viewer tool in MATLAB, find the peak response, percent overshoot, settling time, rise time, and steady state of the step response of the system given with the closed loop transfer function: a) G(s)- (s + 3)(s2 + 3s + 20) , 12 b) G(s) = s +3s2+5s +5 3s2+5s+5 Hint: Type "ltiview" in command window of the MATLAB)
Most questions answered within 3 hours.
-
Where is the error in this code sequence?
String s1 = "Hello";
String s2 = "ello";...
asked 10 months ago -
Financial data for Joel de Paris, Inc., for last year
follow:
Joel de Paris, Inc.
Balance...
asked 10 months ago -
Consider this reaction:
Al2(SO4)3 (aq)+ BaCl3
(aq) Al2Cl6 (aq)- +
3BaSO4(s) . What is the...
asked 10 months ago -
Suppose that Savneet is considering increasing her
recent random sample from 20 car rentals to 40...
asked 10 months ago -
Trucks arrive at an unloading terminal at an average rate of 120
per hour.
Trucks arrive...
asked 10 months ago -
Why are methanol and ethanol completely soluble in water while
octanol is not very little soluble....
asked 10 months ago -
A facilities manager at a university reads in a research report
that the mean amount of...
asked 10 months ago -
When the CuSO4 is rehydrated by adding water to the anhydrous
compound, is this an endothermic...
asked 10 months ago -
A ray of sunlight is passing from diamond into crown glass; the
angle of incidence is...
asked 10 months ago -
A block of mass 0.249 kg is placed on top of a light, vertical
spring of...
asked 10 months ago -
how do the kidneys compensate in the presences of acidosis
a) trigger hyperventilate
b) reserve acid...
asked 10 months ago -
Question 501 pts
The rental rate of capital to the firm increases. Which of the
following...
asked 10 months ago